For details, refer to the AC Servomotors/Servo Drives 1S-series with Built-in EtherCA
T
Communications User’s Manual (Cat. No. I586) or AC Servomotors/Servo Drives 1S-series with
Built-in EtherCAT Communications and Safety Functionality User’s Manual (Cat. No. I621).
Settings for OMRON G5-series Servo Drives
To use this instruction, you must use the Support Software of the servo drive to set Torque Limit
Selection (3521 hex) in the Servo Drive.
• Set the Torque Limit Selection to 6 to apply a torque limit in the home input detection direction dur-
ing the holding operation for homing and to use the torque limit directions and values that are set
with this instruction for other operations.
In that case, the values of the input variables to this instruction are ignored during the holding opera-
tion for homing.
• If the Torque Limit Selection is set to 4, the values of the input variables to this instruction are always
used. You must set torque limits that are suitable both for the holding operation during homing and
for other operations.
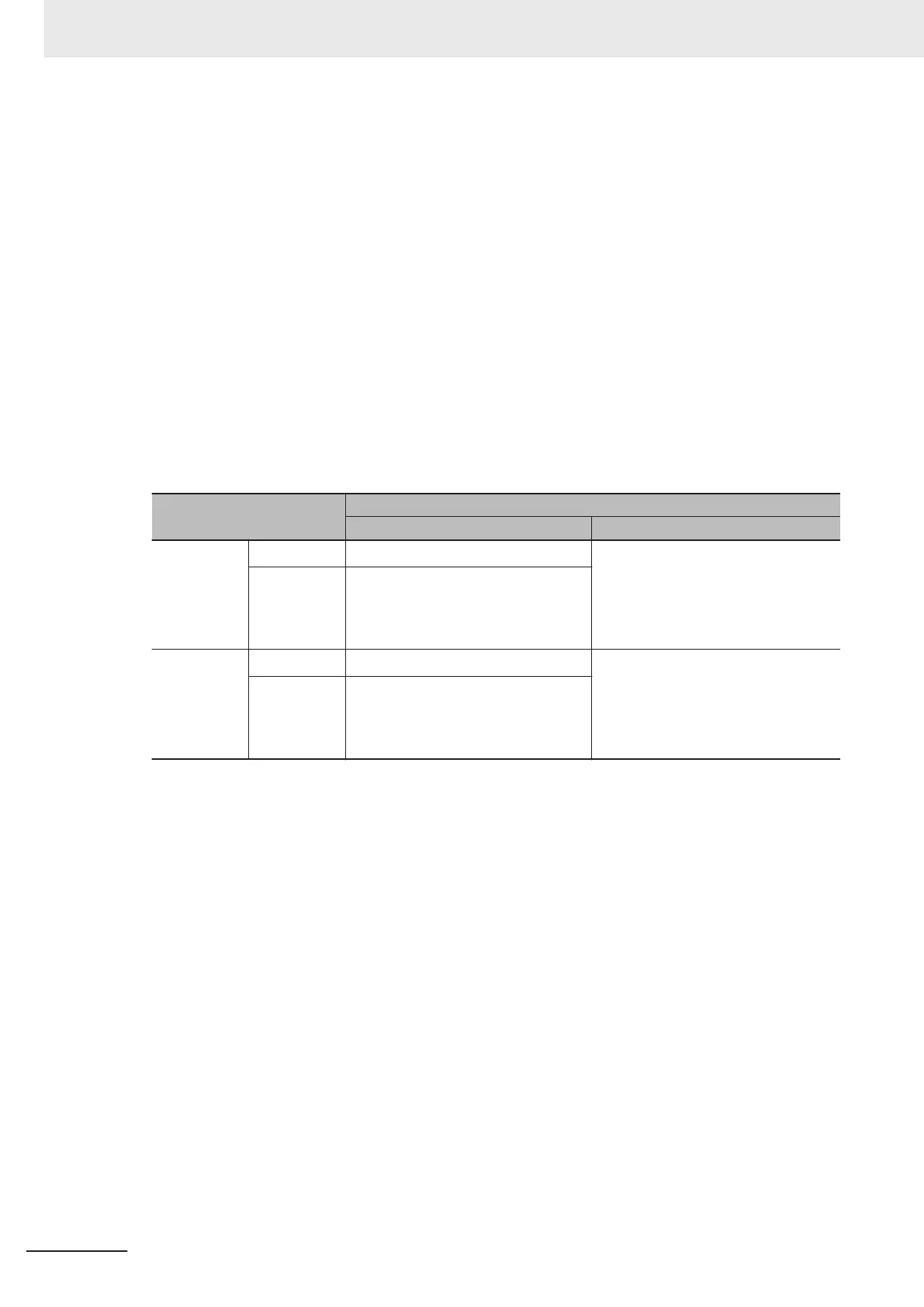
Torque Limit Selection (3521 hex)
6 (recommended) 4
Positive Tor-
que Limit
Homing
*1
Torque Limit 3 (3525 hex) is used. The smaller of the PositiveV
alue
(Positive Torque Limit) for this instruc-
tion and Torque Limit 1 (3013 hex) is
used.
Operations
other than
Homing
The smaller of the PositiveV
alue
(Positive Torque Limit) for this in-
struction and Torque Limit 1 (3013
hex) is used.
Negative Tor-
que Limit
Homing
*1
Torque Limit 4 (3526 hex) is used. The smaller of the NegativeV
alue
(Negative Torque Limit) for this in-
struction and Torque Limit 2 (3522
hex) is used.
Operations
other than
Homing
The smaller of the NegativeV
alue
(Negative Torque Limit) for this in-
struction and Torque Limit 2 (3522
hex) is used.
*1. Until the torque limit is automatically released.
For details, refer to the AC Servomotors/Servo Drives G5-series with Built-in EtherCA
T
Communications User’s Manual (Cat. No. I576) or AC Servomotors/Servo Drives G5-series with
Built-in EtherCAT Communications Linear Motor Type User’s Manual (Cat. No. I577).
Relationship to the MC_TorqueControl Instruction
The MC_SetTorqueLimit and the MC_TorqueControl instructions can be used together.
Axes in Axes Groups
This instruction can be used for an axis in an enabled axes group.
Relation to CPU Unit Operating Modes
The values that are set with this instruction in RUN mode are also used after the operating mode
changes to PROGRAM mode.
Applicable Axes and Execution Condition
• You can use this instruction for a servo axis.
3 Axis Command Instructions
3-352
NY-series Motion Control Instructions Reference Manual (W561)