PWR
Error
Axis
Axis
Enable Status
Busy
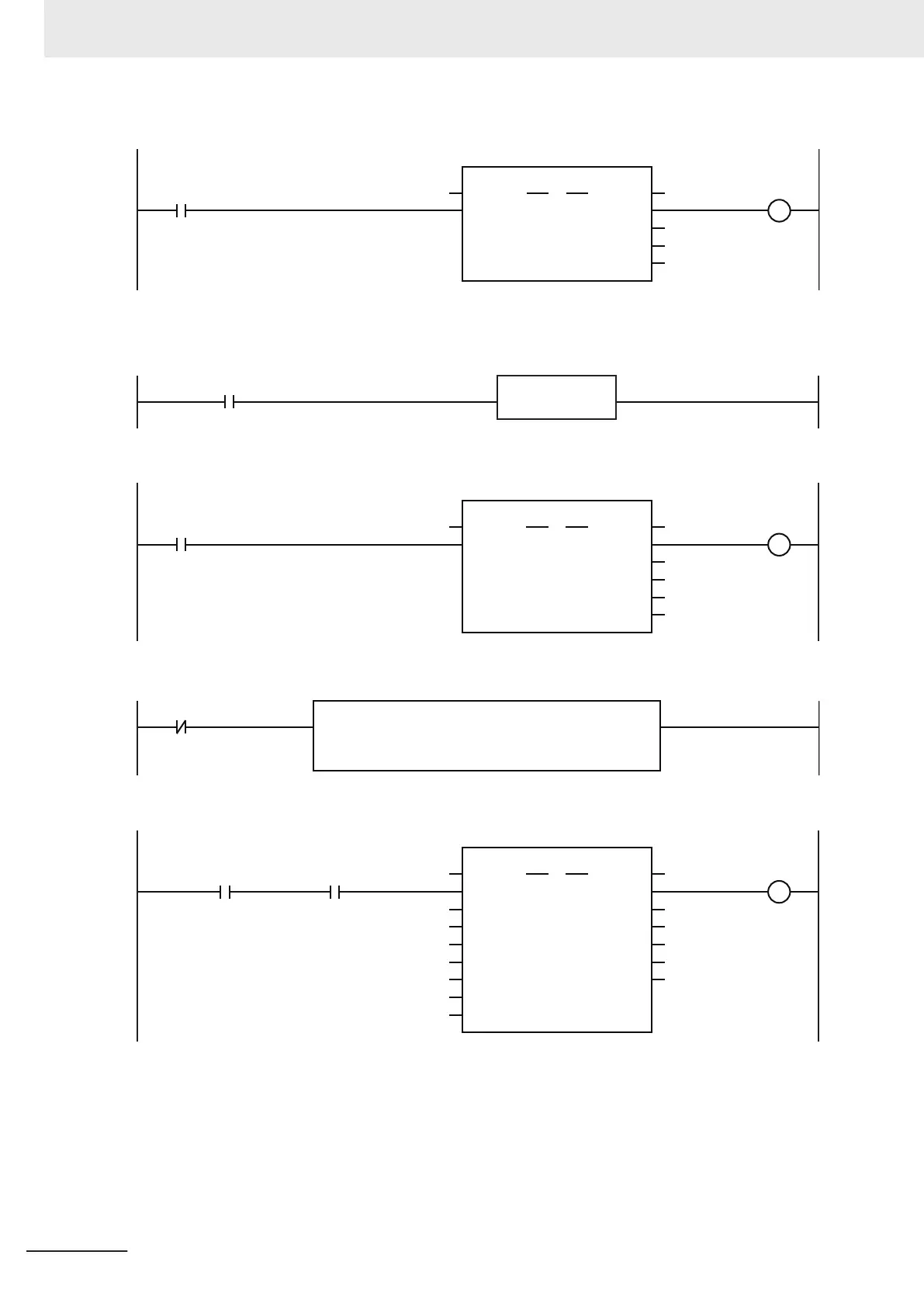
MC_Power
ErrorID
Lock1
MC_Axis0
00 MC_Axis000
Pwr_Status
Pwr_Bsy
Pwr_Err
Pwr_ErrID
If the Servo Drive for axis 1 is ready, the Servo is turned ON.
FaultHandler
MC_Axis0
00.MFaultLvl.Active
FaultHandlerEN
If a minor fault level error occurs for the axis composition, the error handler for the device (FaultHandler) is
executed.
Program the FaultHandler according to the device.
HM
Axis Axis
Execute
Error
ErrorID
CommandAborted
MC_Home
Done
Busy
MC_Axis000 MC_Axis0
00
Pwr_Status
Hm_D
Hm_Bsy
Hm_Ca
Hm_Err
Hm_ErrID
If the Servo is ON for axis 1 and home is not defined, the Home instruction is executed to define home.
InitFlag
Note: The contents of inline ST 1 are given below.
The parameters are set for the MC_MoveVelocity (Velocity Control) instruction.
MC_Axis000 MC_Axis000
MC_Axis000.Details.Homed Hm_D
Vel_InVel
BufferMode
VEL
Jer
k
Active
Axis Axis
Execute
InVelocity
Velocity
Busy
Deceleration
Error
Direction
Continuous
MC_MoveVelocity
Acceleration
CommandAborted
ErrorID
Vel_Vel
Vel_Acc
Vel
_Bsy
Vel_Act
Vel_Ca
Vel_Err
Vel_ErrID
Vel_Dec
Vel_Jrk
The MC_MoveVelocity (Velocity Control) instruction is executed if home is defined for axis 1.
3 Axis Command Instructions
3-442
NY-series Motion Control Instructions Reference Manual (W561)
 Loading...
Loading...





