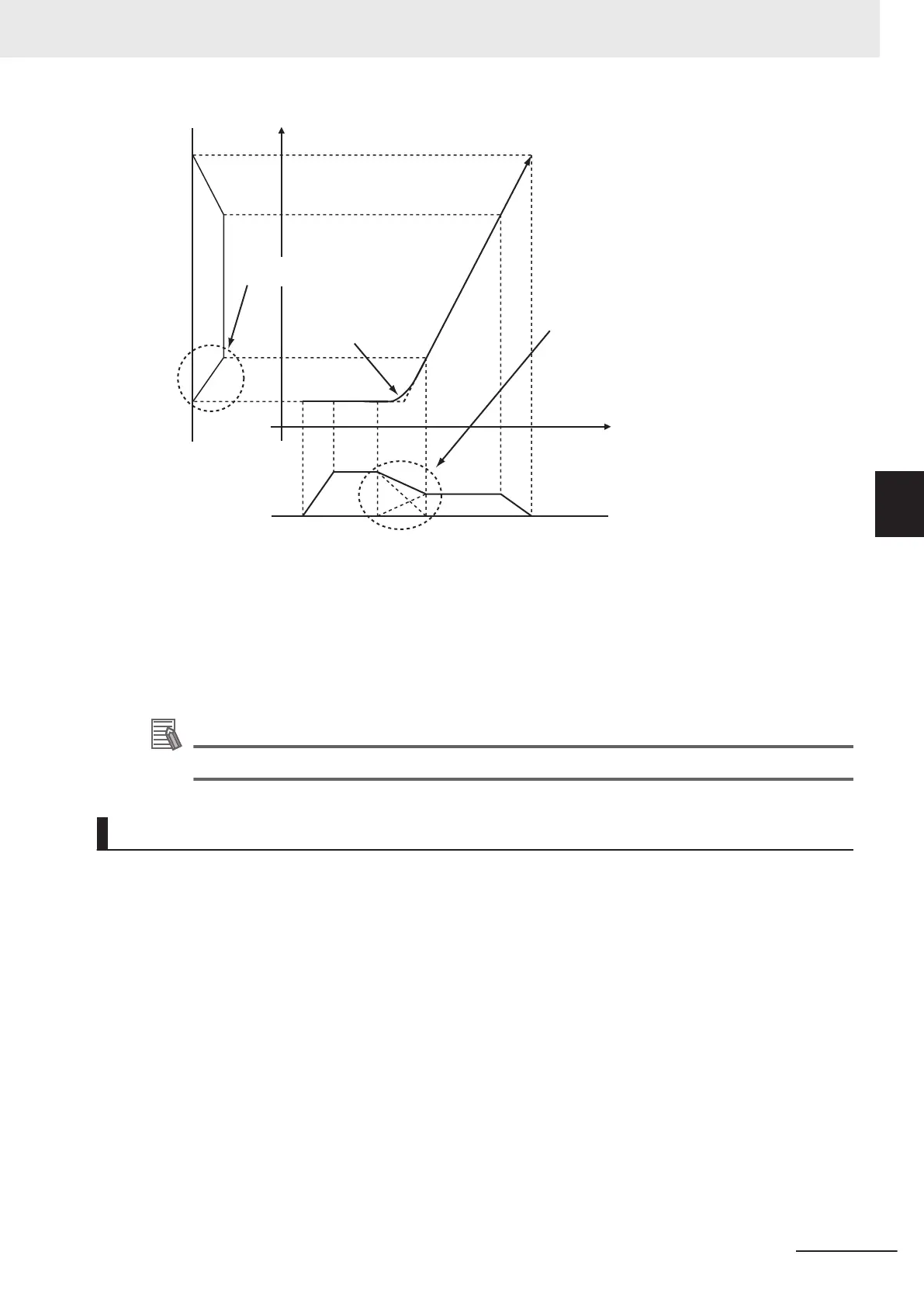
A1
A0
P3
P2
P1
The velocity command is
made continuous by
combining the deceleration
range of the previous
motion and the acceleration
range of the current motion.
Velocity of axis A0
Velocity of axis A1
The path goes
near P2.
The velocity is
continuous.
The combined path passes near P2.
The distance from P2 to the path is as below:
•
It is longer when the interpolation velocity is faster or the deceleration rate of the previous instruction
is smaller.
• It is shorter when the interpolation velocity is slower or the deceleration rate of the previous instruc-
tion is larger.
Additional Information
The Jerk settings are disabled in the region with superimposed corners.
Re-execution of Motion Control Instructions
This instruction cannot be re-executed.
A Motion Control Instruction Re-execution Disabled error (error code: 543B hex) occurs if re-execution
is attempted, and all axes in the circular interpolation motion stop.
4 Axes Group Instructions
4-59
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveCircular2D
4
Function