Precautions for Correct Use
• The error clear processing that is performed by this instruction sometimes requires more than
one control period.
•
The Failure output variable from the instruction will change to TRUE if the axis is in motion.
Remove the cause of the error, and then retry the process until Done changes to TRUE.
• After you remove the cause of the error, execute the instruction only after you confirm that the
axes have stopped completely.
• If you use this instruction for an OMRON G5-series Servo Drive, perform exclusive control of
instructions so that the ResetECError (Reset EtherCAT Error) instruction is not executed at
the same time.
• If this instruction is used for an NX-series Pulse Output Unit, the error in the Servo Drive that
is connected to the Pulse Output Unit is not reset. Refer to the NX-series Position Interface
Units User’s Manual (Cat. No. W524) for details.
Additional Information
• You can clear axis errors only when the axes group is enabled.
•
The following errors cannot be cleared with this instruction.
All axis common errors
To clear axis common errors, execute the ResetMcError (Reset All Errors) instruction sepa-
rately.
• If you execute this instruction on an axes group for which there is no error, the instruction is
completed normally and the current status is continued.
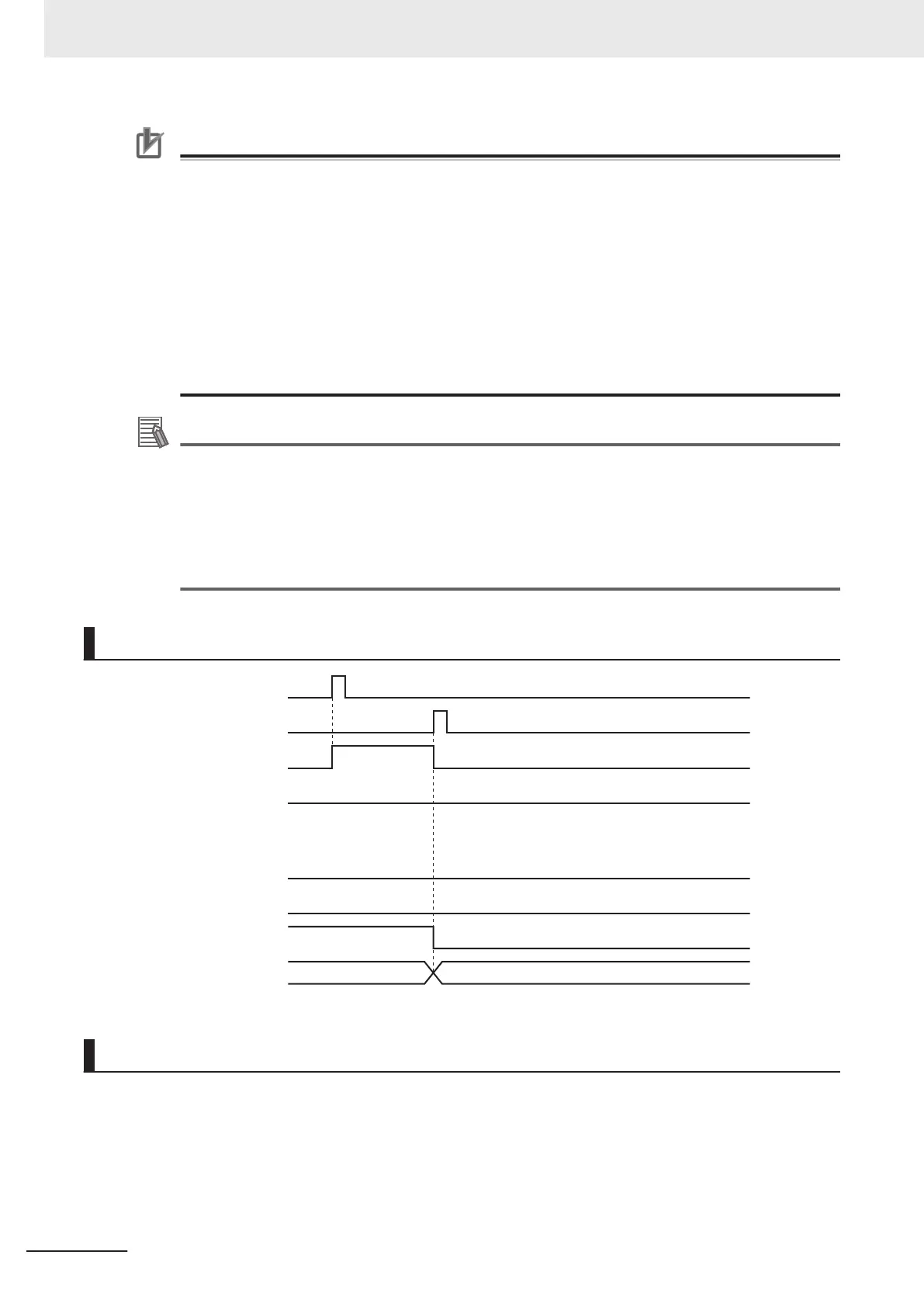
Timing Charts
Error code
Instruction
Output Parameters during Errors
Busy
Execute
Failure
Done
Busy
Error
ErrorID
16#0000
Active
Aborting the Instruction
The instruction is aborted if it is not possible to clear errors that occur when the axis or axes group is
decelerating to a stop for an error or errors that occur during axes group errors resulting from axis
common errors.
4 Axes Group Instructions
4-108
NY-series Motion Control Instructions Reference Manual (W561)