CamNode0[1].Curve := _eMC_CAM_CURVE#_mcStraightLine;
CamNode0[1].ConnectingVelEnable := FALSE;
CamNode0[1].ConnectingVel := REAL#0.000;
CamNode0[1].ConnectingAccEnable := FALSE;
CamNode0[1].ConnectingAcc := REAL#0.000;
CamNode0[2].Phase := REAL#360.000;
CamNode0[2].Distance := REAL#0.000;
CamNode0[2].Curve := _eMC_CAM_CURVE#_mcPolynomic5;
CamNode0[2].ConnectingVelEnable := FALSE;
CamNode0[2].ConnectingVel := REAL#0.000;
CamNode0[2].ConnectingAccEnable := FALSE;
CamNode0[2].ConnectingAcc := REAL#0.000;
CamNode0[2].PhasePitch := REAL#0.010;
CamNode0[3].Phase := REAL#0.000;
WriteCamDefinitionDone := TRUE;
Structured Text (ST)
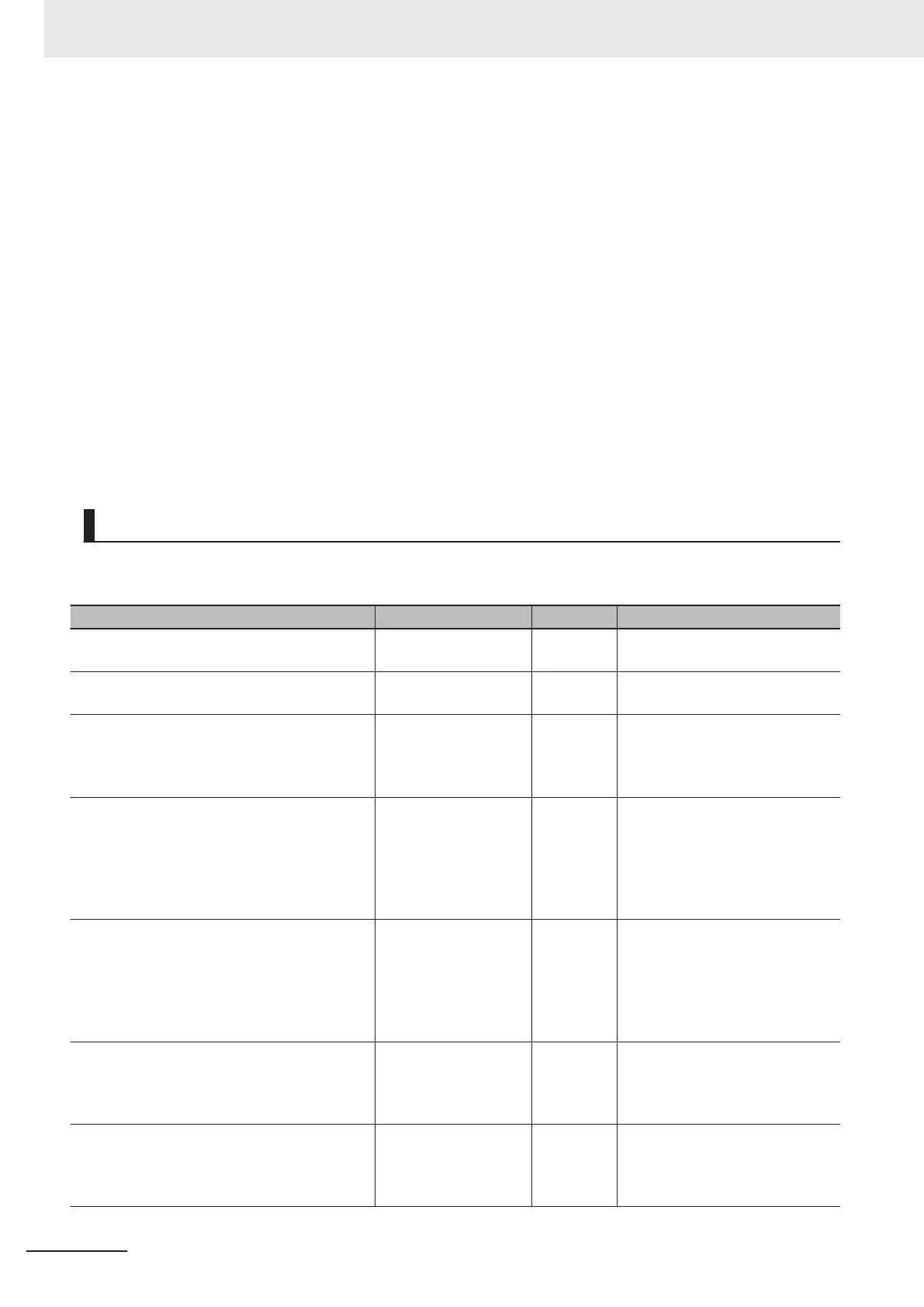
Main Variables
Name Data type Default Comment
MC_Axis000 _sAXIS_REF --- Axis Variable for the master axis,
axis 1.
MC_Axis001 _sAXIS_REF --- Axis Variable for the slave axis,
axis 2.
CamProfile0 ARRAY[0..36000] OF
_sMC_CAM_REF
--- This is the cam data variable.
The cam profile curve is created
in advance on the Cam Editor of
the Sysmac Studio.
Pwr1_Status BOOL --- This variable is assigned to the
Status output variable from the
PWR1 instance of the MC_Power
instruction. This variable changes
to TRUE when the Servo is
turned ON.
Pwr2_Status BOOL --- This variable is assigned to the
Status output variable from the
PWR2 instance of the MC_Power
instruction. This variable changes
to TRUE when the Servo is
turned ON.
StartPg BOOL --- The Servo is turned ON if this
variable is TRUE and EtherCA
T
process data communications are
established.
WriteCamDefinition BOOL --- The values in the cam property
variable and cam node variable
are written when this variable is
TRUE.
5 Common Command Instructions
5-40
NY-series Motion Control Instructions Reference Manual (W561)