• If the error is reset successfully when the servo is OFF or if Execute
of the MC_Stop instruction is
TRUE, the status will change to Axis Disabled (A).
• If the error is reset successfully when the servo is ON, the status will change to Standstill (B).
• If Execute for the MC_Stop instruction is TRUE, the status will change to Deceleration Stopping (G).
• If resetting the error fails, the status will change to Error Deceleration Stopping (H) regardless of
whether the servo is ON or OFF.
*11. If _MC_AX[*].Details.VelLimit (Command Velocity Saturation) in the Axis Variable is TRUE, the status
will change to Error Deceleration Stopping (H). If it is F
ALSE, the axis will change to an unused axis, so
the axis status will be ---.
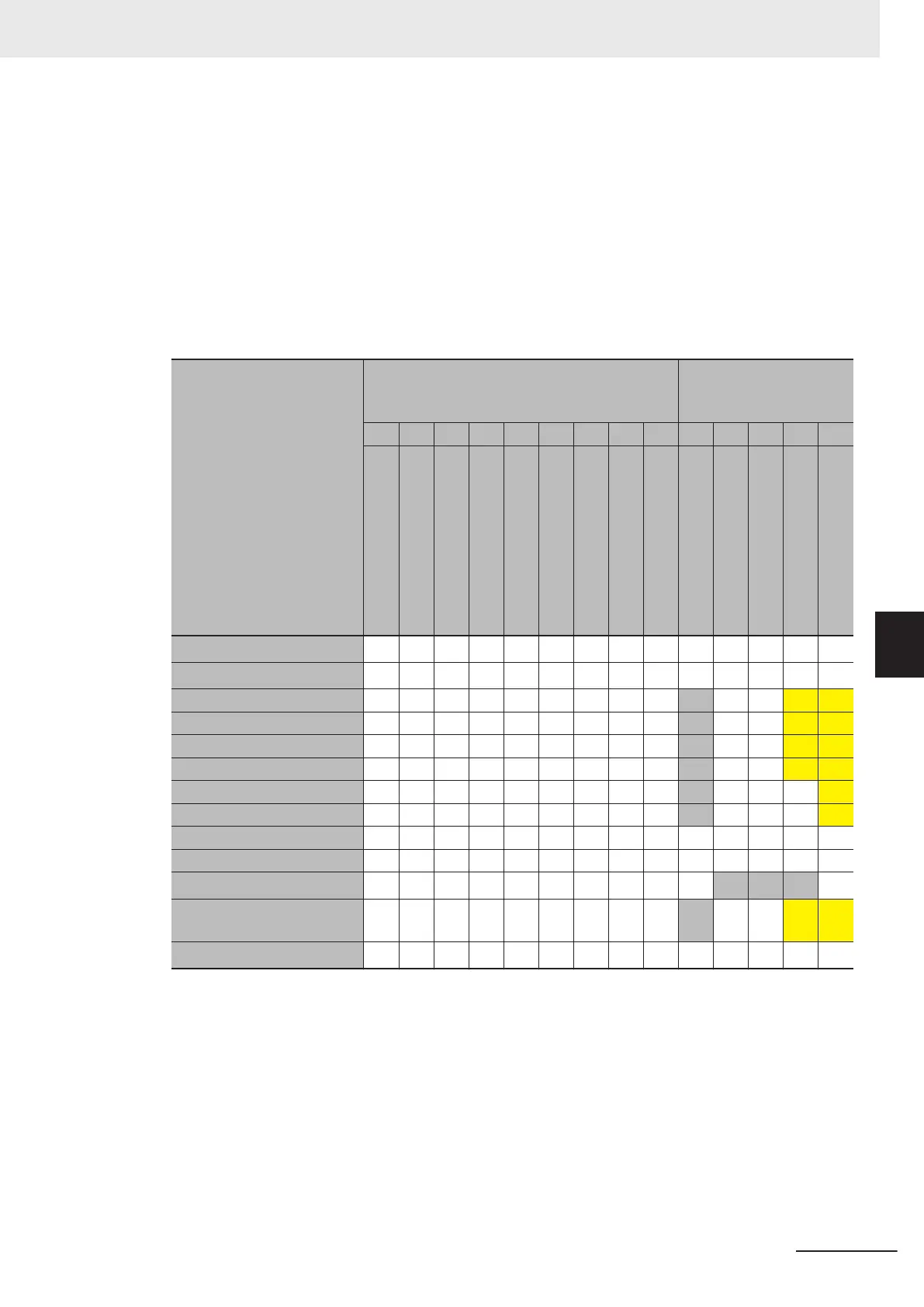
Axes Group Instructions
Instruction
Axis status before instruction execution
Axes group status be-
fore instruction execu-
tion
A B C D E F G H I a b c d e
Axis Disabled
Standstill
Discrete Motion
Continuous Motion
Synchronized Motion
Homing
Deceleration Stopping
Error Deceleration Stopping
Coordinated Motion
Axes Group Disabled
Standstill
Moving
Deceleration Stopping
Error Deceleration Stopping
MC_GroupEnable I I C D E F G H I b b c d
e
*1
MC_GroupDisable A B C D E F G H
*2
a a a a e
MC_MoveLinear A B C D E F G H I e c c d e
MC_MoveLinearAblolute A B C D E F G H I e c c d e
MC_MoveLinearRelative A B C D E F G H I e c c d e
MC_MoveCircular2D A B C D E F G H I e c c d e
MC_GroupStop A B C D E F G H I e d d d e
MC_GroupImmediateStop A B C D E F G H I e e e e e
MC_GroupSetOverride A B C D E F G H I a b c d e
MC_GroupReadPosition A B C D E F G H I a b c d e
MC_ChangeAxesInGroup A B C D E F G H I
a
*3
e e e
e
*4
MC_GroupSyncMoveAb-
solute
A B C D E F G H I e c c d e
MC_GroupReset A B C D E F G H I a b c d
*5
*1. If the servo is OFF, CommandAborted changes to TRUE.
*2. The status changes as follows for the given conditions:
• If there is no error and the servo is OFF
, the status will change to Axis Disabled (A).
• If Execute for the MC_GroupStop instruction is FALSE and the servo is OFF, the status will change to
Standstill (B).
• If Execute for the MC_GroupStop instruction is TRUE and the servo is ON, the status will change to
Deceleration Stopping (G).
• If an error occurs, the status will change to Error Deceleration Stopping (H) regardless of whether the
servo is ON or OFF.
*3. If the MC_GroupEnable instruction is being executed, an error will occur and the status will change to
Error Deceleration Stopping (e).
An error will occur if the axis is in single-axis position control, as it cannot be set as the axes group com-
position axis.
Appendices
A-7
NY-series Motion Control Instructions Reference Manual (W561)
A-1 Instructions for Which Multi-execution Is Supported
A
A-1-2 State Transitions and Instructions for which Multi-execution Is Supported