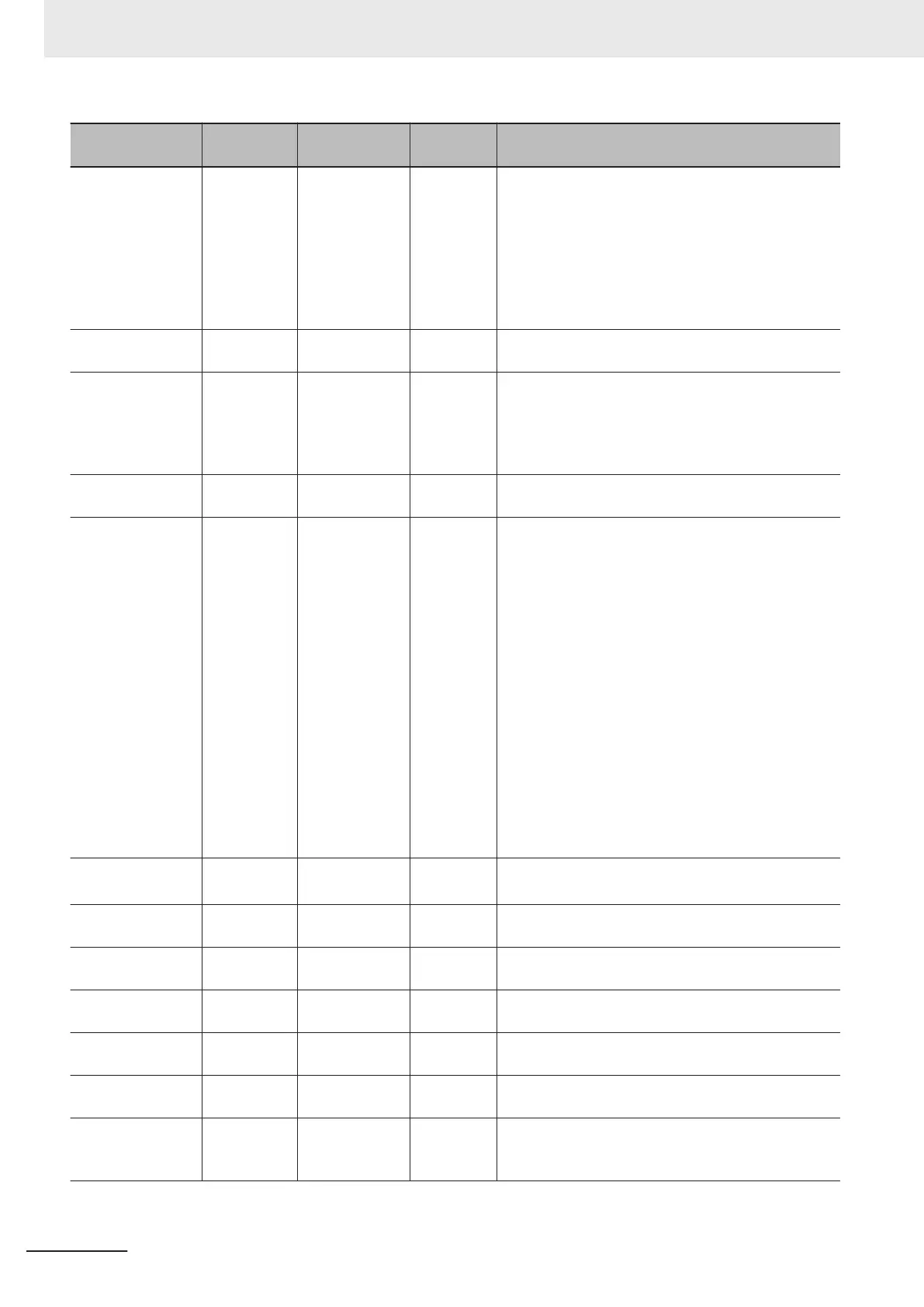
Name Meaning Data type
Valid
range
Description
Done Done BOOL TRUE or
F
ALSE
TRUE when the instruction is completed.
At this time, output variables Active, Error, and
CommandAborted are FALSE.
Done will be TRUE for at least one period if the input
variable Execute is FALSE when the instruction is
completed.
If Execute is TRUE, Done remains TRUE until
Execute changes to FALSE.
Busy Executing BOOL TRUE or
F
ALSE
Changes to TRUE when an instruction is acknowl-
edged.
Active Controlling BOOL TRUE or
F
ALSE
Changes to TRUE when the instruction is executed.
This variable is TRUE while the instruction is actually
controlling an axis or axes group. At this time, output
variables Done, Error, and CommandAborted are
FALSE.
Enabled Enabled BOOL TRUE or
F
ALSE
Changes to TRUE when busy.
CommandAborted Instruction
Aborted
BOOL TRUE or
F
ALSE
TRUE when an instruction could not be executed or
when it was aborted during execution.
The instruction is not executed if there is an error
with the target axis or axes group. Similarly, the in-
struction is not executed while the target axis or axes
group is decelerating to a stop.
The instruction is aborted when another instruction is
executed, or if an error other than for this instruction
occurs.
At this time, output variables Done, Active, and Error
change to FALSE. If the instruction is aborted while
the input variable Execute is FALSE,
CommandAborted will be TRUE for at least one peri-
od.
If Execute or Enable is TRUE, CommandAborted re-
mains TRUE until Execute or Enable changes to
FLASE.
Error Error BOOL TRUE or
F
ALSE
TRUE when there is an error caused by a mistake in
an input variable or instruction processing.
*1
ErrorID Error Code WORD
*2
Contains the error code when an error occurs.
16#0000 indicates normal operation.
Failure Failure End BOOL TRUE or
F
ALSE
TRUE when the instruction was not executed correct-
ly.
Status Servo ON BOOL TRUE or
F
ALSE
TRUE when the device is ready for operation.
EndOfProfile End of Cam
Cycle
BOOL TRUE or
F
ALSE
Changes to TRUE when the cam table end point is
executed.
Index Index UINT Non-nega-
tive number
Contains the cam data index number.
StartSync Following BOOL TRUE or
F
ALSE
TRUE when acceleration/deceleration is started for
synchronization and the device is ready for opera-
tion.
2 Variables and Instructions
2-28
NY-series Motion Control Instructions Reference Manual (W561)