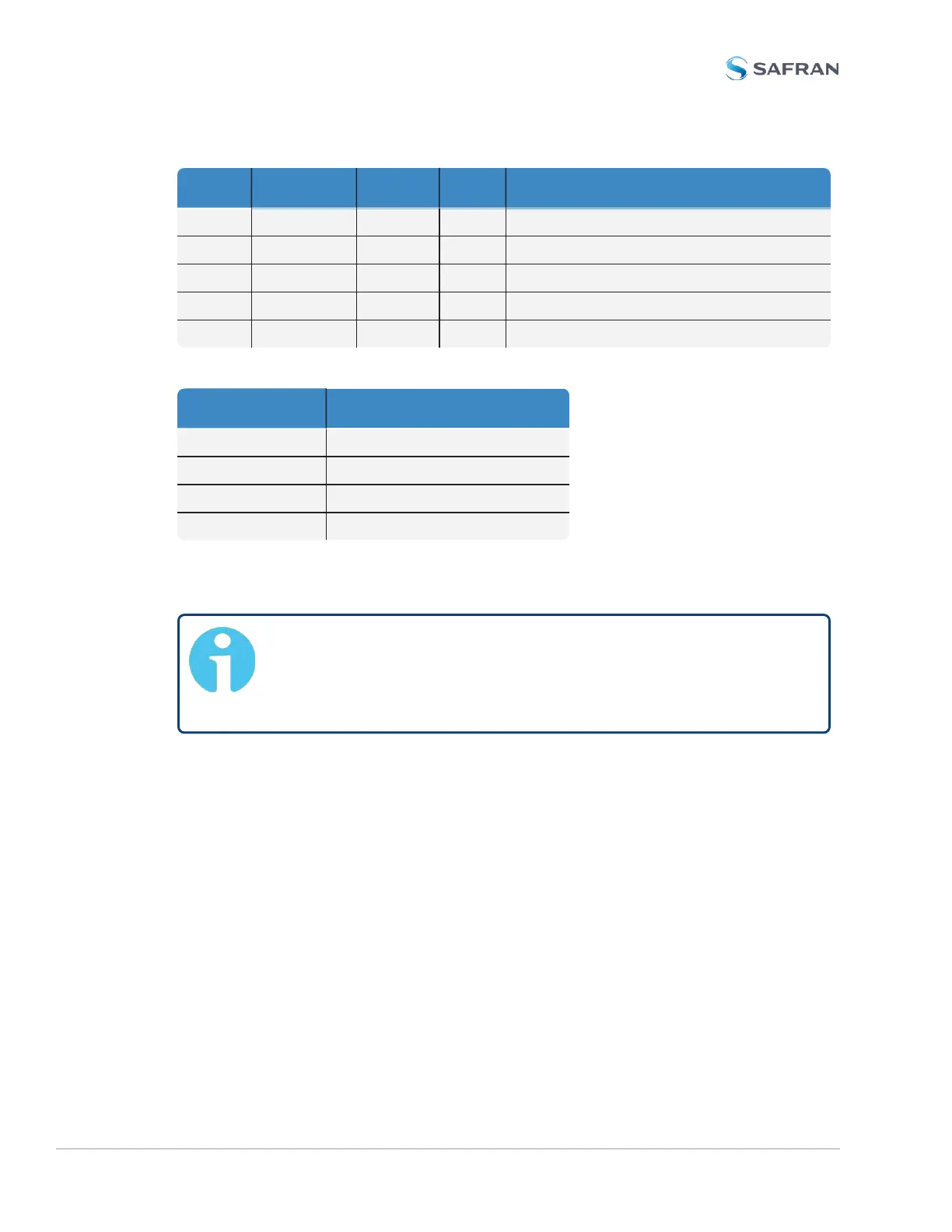
Offset Name Format Unit Description
52 PosAccX float m ECEF X position accuracy estimate.
56 PosAccY float m ECEF Y position accuracy estimate.
60 PosAccZ float m ECEF Z position accuracy estimate.
64 SpeedAcc float m/s Speed accuracy estimate.
68 TimeAcc float sec Time accuracy estimate.
Table 5-17:
GPS Fix
Value Description
0 No fix
1 Time only
2 2D
3 3D
This register provides the GPS PVT (position, velocity, & time) solution from GPS
receiver A. This is the GPS receiver that is used by the INS (Inertial Navigation Sys-
tem) Kalman filter for position and velocity inputs.
Note: You can configure the device to output this register at a fixed
rate using the Async Data Output Type Register in the System sub-
system. Once configured the data in this register will be sent out
with the $VNGPE header.
5.3.4.14 VNINS
Output Type: INS Solution – LLA
Register ID: 63
Async Header: INS
Access: Read Only
Size (Bytes): 72
334 VersaSync User Manual
APPENDIX