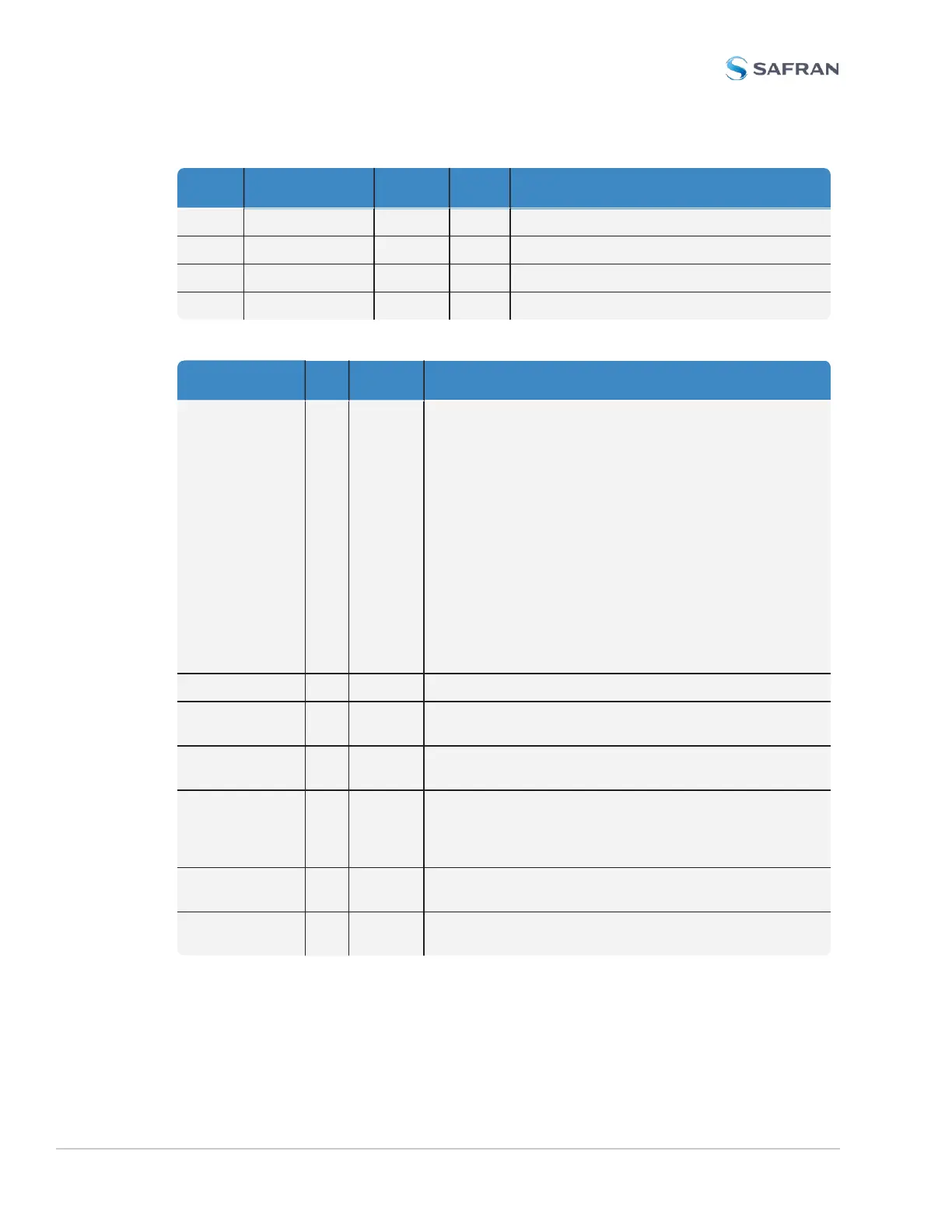
Offset Name Format Unit Description
56 VelocityZ float m/s INS solution velocity in ECEF frame. (Z-axis)
60 AttUncertainty float deg Expected uncertainty in estimated attitude.
64 PosUncertainty float m Expected uncertainty in estimated position.
68 VelUncertainty float m/s Expected uncertainty in estimated velocity.
Name Bit Format Description
Mode 0 2 bits Indicates the current mode of the INS filter.
0 = Not tracking. GPS Compass is initializing. Output head-
ing is based on magnetometer measurements.
1 = Aligning. INS Filter is dynamically aligning. For a sta-
tionary startup: GPS Compass has initialized and INS Fil-
ter is aligning from the magnetic heading to the GPS
Compass heading. For a dynamic startup: INS Filter has
initialized and is dynamically aligning to True North head-
ing. In operation, if the INS Filter drops from INS Mode
2 back down to 1, the attitude uncertainty has increased
above 2 degrees.
2 = Tracking. The INS Filter is tracking and operating
within specification.
3 = Loss of GPS. A GPS outage has lasted more than 45
seconds. The INS Filter will no longer update the position
and velocity outputs, but the attitude remains valid.
GpsFix 2 1 bits Indicates whether the GPS has a proper fix.
Error 3 4 bits Sensor measurement error code. See table below. 0 = No
errors detected.
Reserved 7 1 bit Reserved for internal use. May toggle state during
runtime and should be ignored.
GpsHeadingIns 8 1 bit In stationary operation, if set the INS Filter has fully
aligned to the GPS Compass solution.
In dynamic operation, the GPS Compass solution is cur-
rently aiding the INS Filter heading solution.
GpsCompass 9 1 bit Indicates if the GPS compass is operational and reporting
a heading solution.
Reserved 10 8 bits Reserved for internal use. These bits will toggle state and
should be ignored.