Example Read Response: $VNRRG, 73, +170.558, +001.267, +001.762,
+00.001502, - 00.000403, +00.000394, - 626343.88590823, -
5320499.92650050, +3450022.606, +000.001, -000.010, +000.094, +00.255, -
00.308, -10.060*50
Example Async Message: $VNISE, +170.558, +001.267, +001.762, +00.001502, -
00.000403, +00.000394, - 626343.88590823, - 5320499.92650050,
+3450022.606, +000.001, -000.010, +000.094, +00.255, -00.308, -10.060*XX
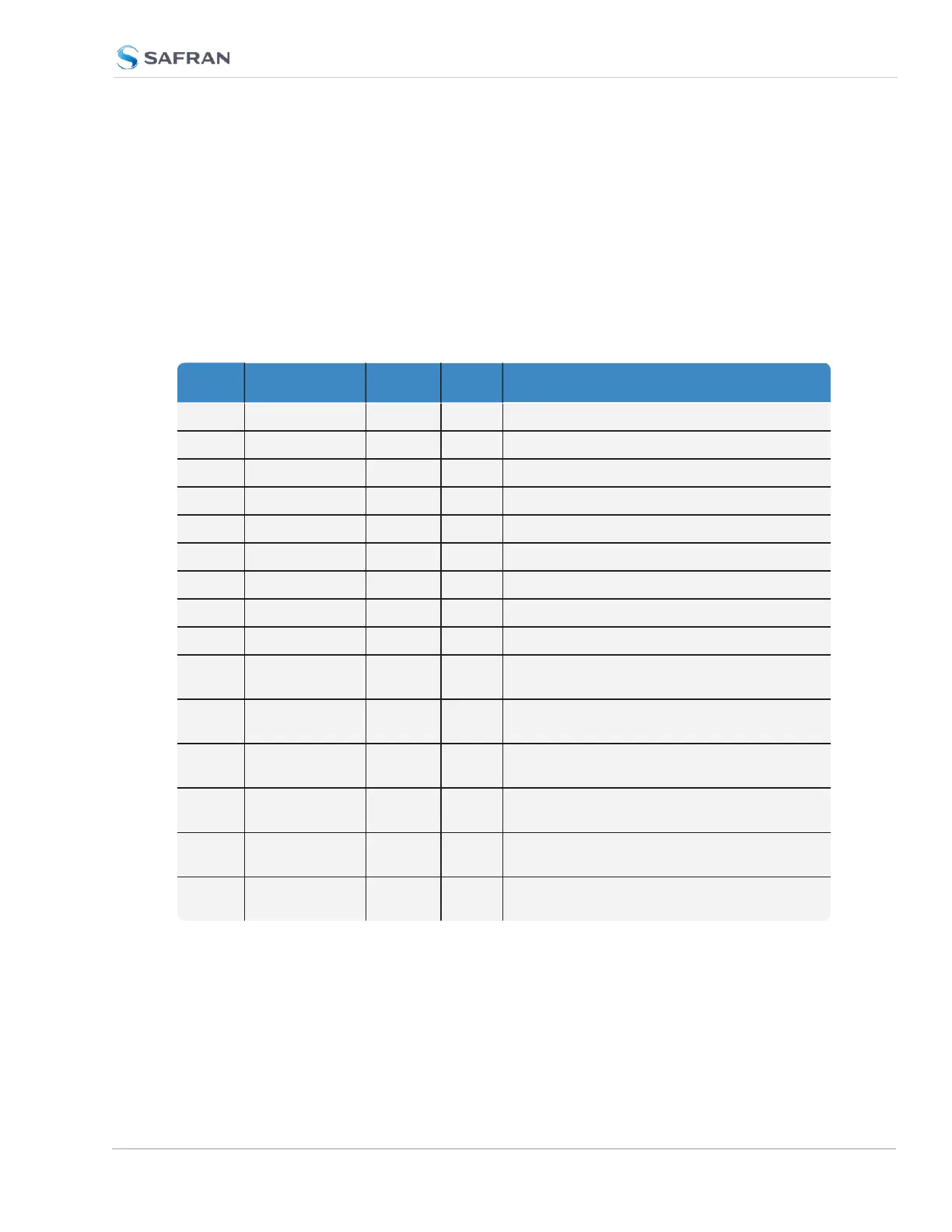
Table 5-25:
VNISE Settings
Offset Name Format Unit Description
0 Yaw float deg Yaw angle relative to true north.
4 Pitch float deg Pitch angle relative to horizon.
8 Roll float deg Roll angle relative to horizon.
12 PositionX double m Estimated position in ECEF. (X-axis)
20 PositionY double m Estimated position in ECEF. (Y-axis)
28 PositionZ double m Estimated position in ECEF. (Z-axis)
36 VelocityX float m/s Estimated velocity in ECEF frame. (X-axis)
40 VelocityY float m/s Estimated velocity in ECEF frame. (Y-axis)
44 VelocityZ float m/s Estimated velocity in ECEF frame. (Z-axis)
48 AccelX float m/s
2
Estimated acceleration in body frame. (X-
axis)
52 AccelY float m/s
2
Estimated acceleration in body frame. (Y-
axis)
56 AccelZ float m/s
2
Estimated acceleration in body frame. (Z-axis)
60 AngularRateX float rad/s Estimated angular rate in body frame. (X-axis)
64 AngularRateY float rad/s Estimated angular rate in body frame. (Y-axis)
68 AngularRateZ float rad/s Estimated angular rate in body frame. (Z-axis)
VersaSync User Manual 341
APPENDIX