4.4 Basic Parameter Adjustments
YASKAWA TM.V1000.01 V1000 Drive Installation & Start-Up Manual (Preliminary 01-19-07) 157
Start-Up Programming &
Operation
4
Setting Procedure
1. Set the motor rated current for motor 1 to E2-01 and motor 2 to E4-01.
Note: 1. Values set for the current become the base current for electronic thermal overload
protection.
2. These values are automatically set by performing Auto-Tuning; manual adjustment will be
necessary if Auto-Tuning cannot be performed.
2. Set the proper motor protection level to L1-01.
The ability of the cooling fan to keep an induction motor cool varies by the
speed control range. Protection characteristics of the electronic thermal
overload protection should be set accordingly. Refer to Table 4.7 for motor
types and overload tolerances.
NOTICE: When connecting multiple motors to one drive, disable the electronic overload
protection of the drive (L1-01 = 0) and protect each motor with its own motor thermal overload.
Failure to comply could result in improper drive operation.
NOTICE: Inadequate motor protection could result in damage to the motor. Configure a motor
thermal overload to disconnect main power to the drive when tripped. When using a thermal
relay, disable the motor protection function (L1-01 = “0”).
3. If desired, set the motor overcurrent alarm warning level.
Set one of the digital output terminals M1-M2, P1 or P2 for the motor
overload alarm (H2-01, H2-02, or H2-03 equals 1F). This will trigger an
alarm when the drive reaches 90% of the overload detection level.
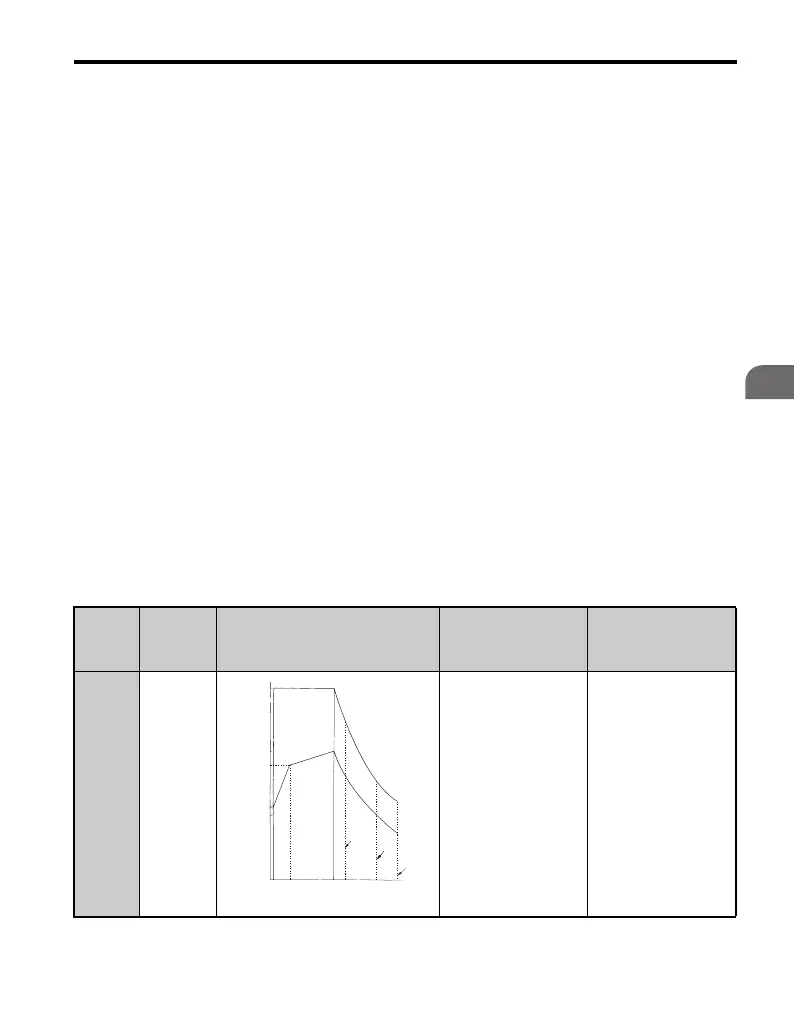
Table 4.7 Motor Type and Overload Tolerances
L1-01
Setting
Motor
Type
Overload Tolerance Cooling Fan Capacity
Electrothermal
Protection
(100% motor
overload)
1
General-
purpose
motor
(standard
motor)
Motor is designed to
operate with full load at
full speed only (50 Hz
and greater). Load needs
to be reduced when
running at frequencies
less than 50 Hz.
Generally acceptable for
variable torque
(centrifugal) loads.
Motor overload (OL1)
will be activated if
operating loads greater
than the overload
tolerance on a
continuous basis at
frequencies less than
50 Hz.
100
150
90
60
50
Torque
(%)
60 seconds
Continuous
0 5 33 100
㧔60Hz㧕
120 167 200
(%)
Speed
C
B
Rated Speed = 100% Speed
A

 Loading...
Loading...










