Tuning D1 Servo Drive User Manual
6-38 HIWIN MIKROSYSTEM CORP.
6.7.2.1 Frequency response function
Frequency response can be expressed by the transfer functions of dynamic system which show the
relationship between input signals and output signals. The control architecture of the servo drive is shown
in figure 6.7.2.1.1.
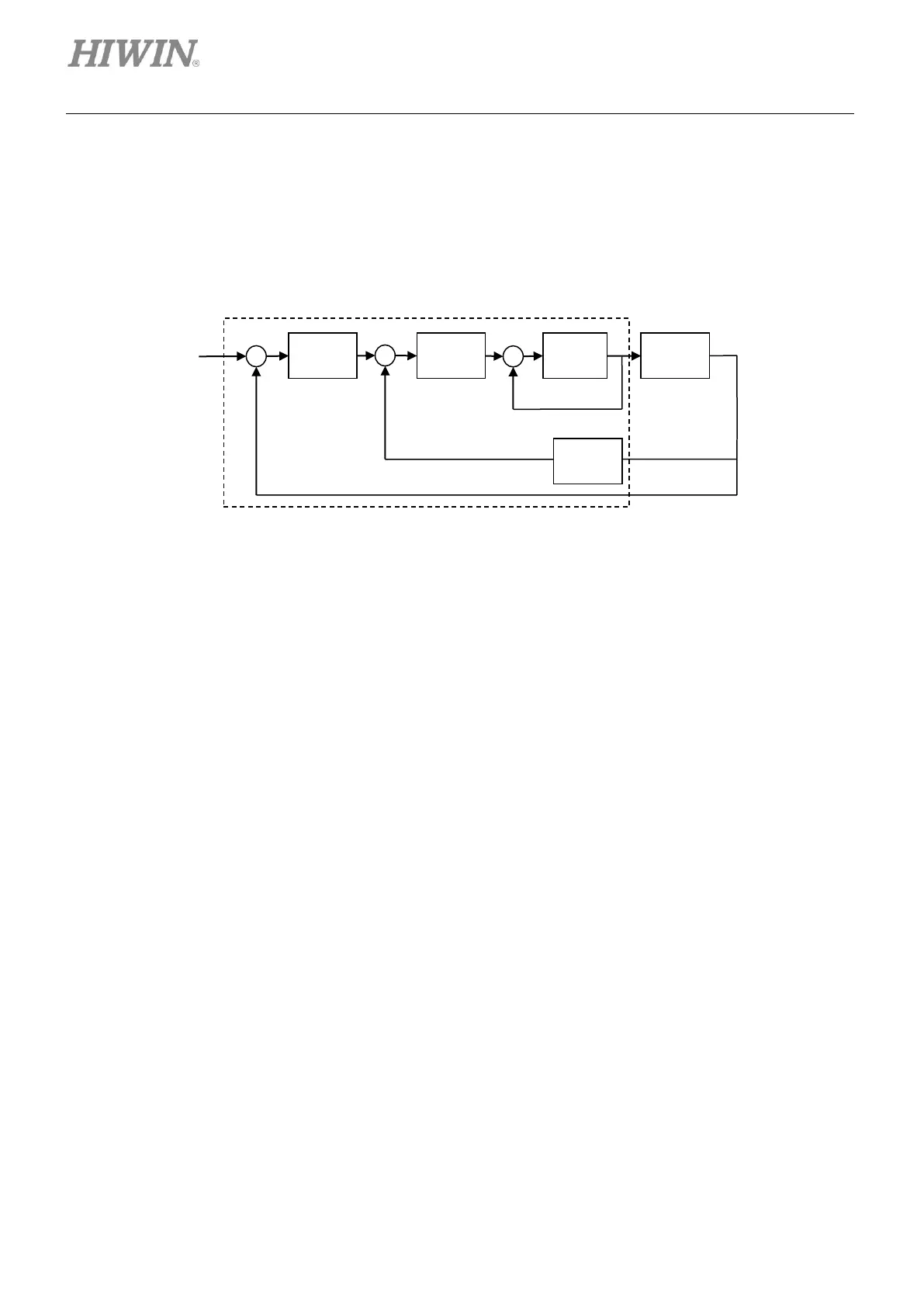
Figure6.7.2.1.1 The control architecture of servo drive
(1) U(s): System input (Servo drive command)
(2) Y(s): System output (Position feedback of encoder)
(3) Plant: PL(s) is the relationship between servo drive command and feedback position. Plant includes
mechanical platform, motor and feedback system.
(4) Controller: P(s) is the position loop controller. V(s) is the velocity loop controller. C(s) is the current
loop controller.
(5) Open loop: The transfer function of open loop system is G(s) = P(s)*V(s)*C(s)*PL(s). All feedback
signals are ignored.
(6) Closed loop: The transfer function of closed-loop system is T(s)= P(s)*V(s)*C(s)*PL(s)/((d/dt*
P(s)*V(s)*C(s)*PL)+ P(s)*V(s)*C(s)*PL)