D1 Servo Drive User Manual Operation Principles
HIWIN MIKROSYSTEM CORP. 3-15
3.9 Velocity ripple
In motion control, it is preferable to have smoother motion in constant speed phase. Velocity ripple is used
to check if the motion is stable or not. In constant speed phase, velocity may vary due to cogging force
from motor, cable chain, air pipeline or guideway friction. Velocity ripple is normally used when equipment
requires high stability while operating at constant speed, such as scanning machine or inspection
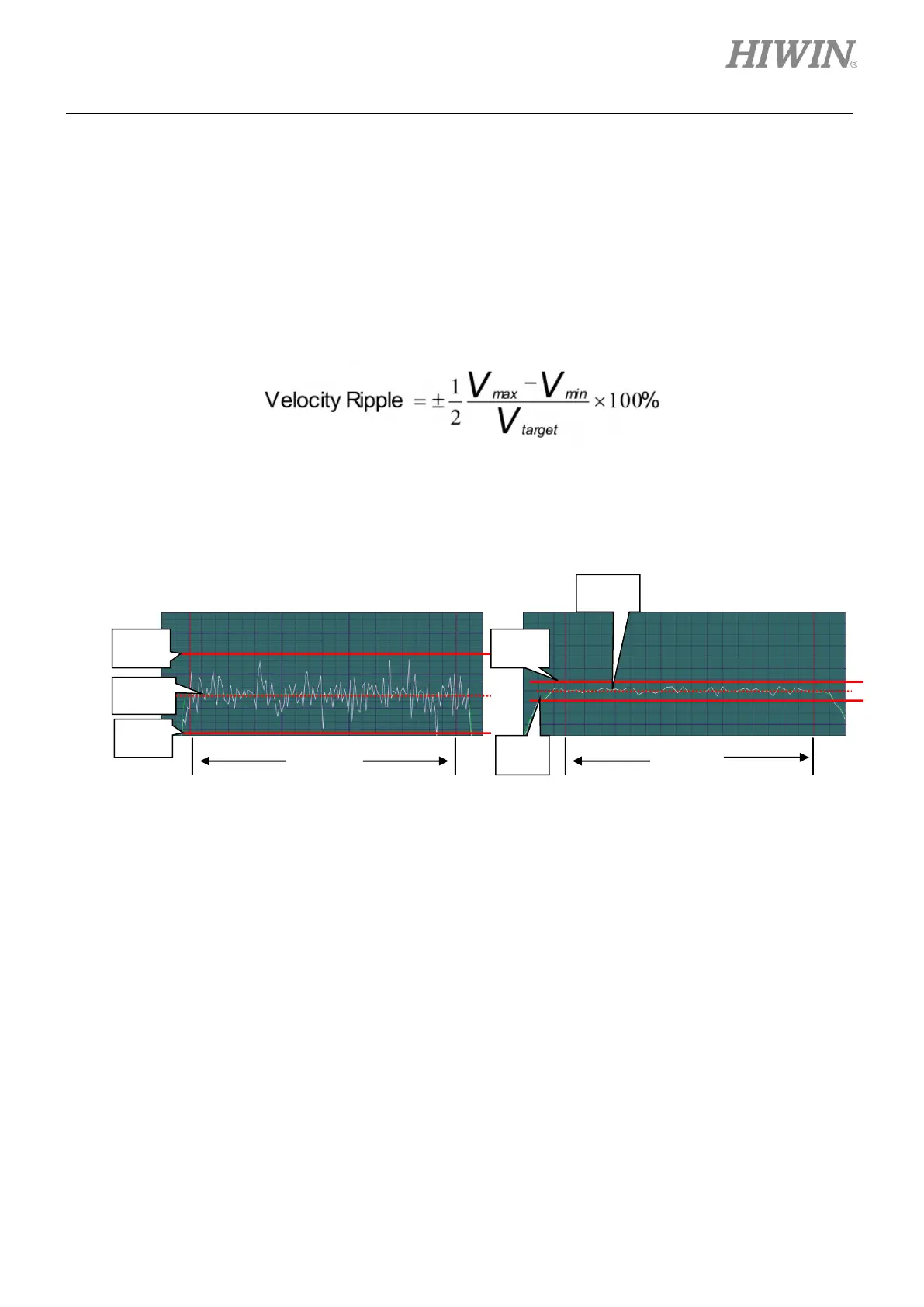
machine. The formula of velocity ripple is:
V
target
is target velocity. V
max
is the maximum velocity in constant speed phase. V
min
is the minimum
velocity in constant speed phase. As figure 3.9.1, velocity ripple in figure (a) is larger, which means the
motion is less stable; velocity ripple in (b) is smaller, which means the motion is more stable.
Figure3.9.1
3.10 Enabling
Enabling must be completed before motor receives any motion command. After enabling, the servo drive
is able to receive pulse command or voltage command from controller to perform motion control.
(1) Step motion mode (SM mode)
Step motion mode (SM mode) is an open loop control architecture. In this mode, the movement of
motor is similar to step motor. Feedback position signal is not adopted when enabling. This mode
can be used to check if force direction is consistent with encoder feedback direction. If force direction
and encoder feedback direction are different, phase initialization could fail.