Operation Principles D1 Servo Drive User Manual
3-6 HIWIN MIKROSYSTEM CORP.
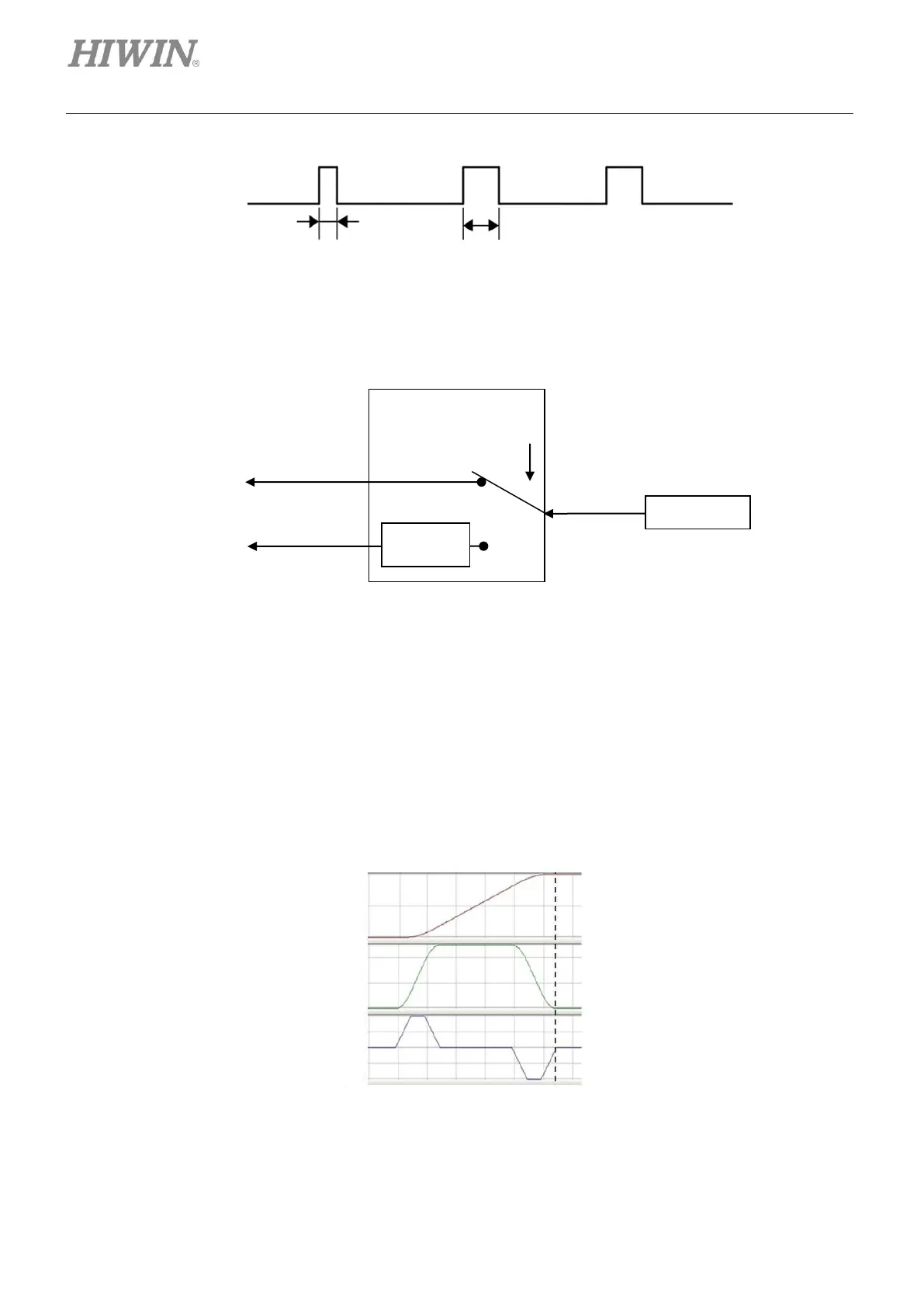
Figure3.3.1
Figure3.3.2
3.4 Path planning
Path planning is usually done by controller. The controller calculates suitable motion command based on
the required distance, velocity, acceleration and smooth factor. These commands (Pulse commands or V
commands) will be sent from the controller to the servo drive or calculated by the servo drive (Stand-alone
mode).
Figure3.4.1
*Home position is reached for
the first time.