D1 Servo Drive User Manual Tuning
HIWIN MIKROSYSTEM CORP. 6-29
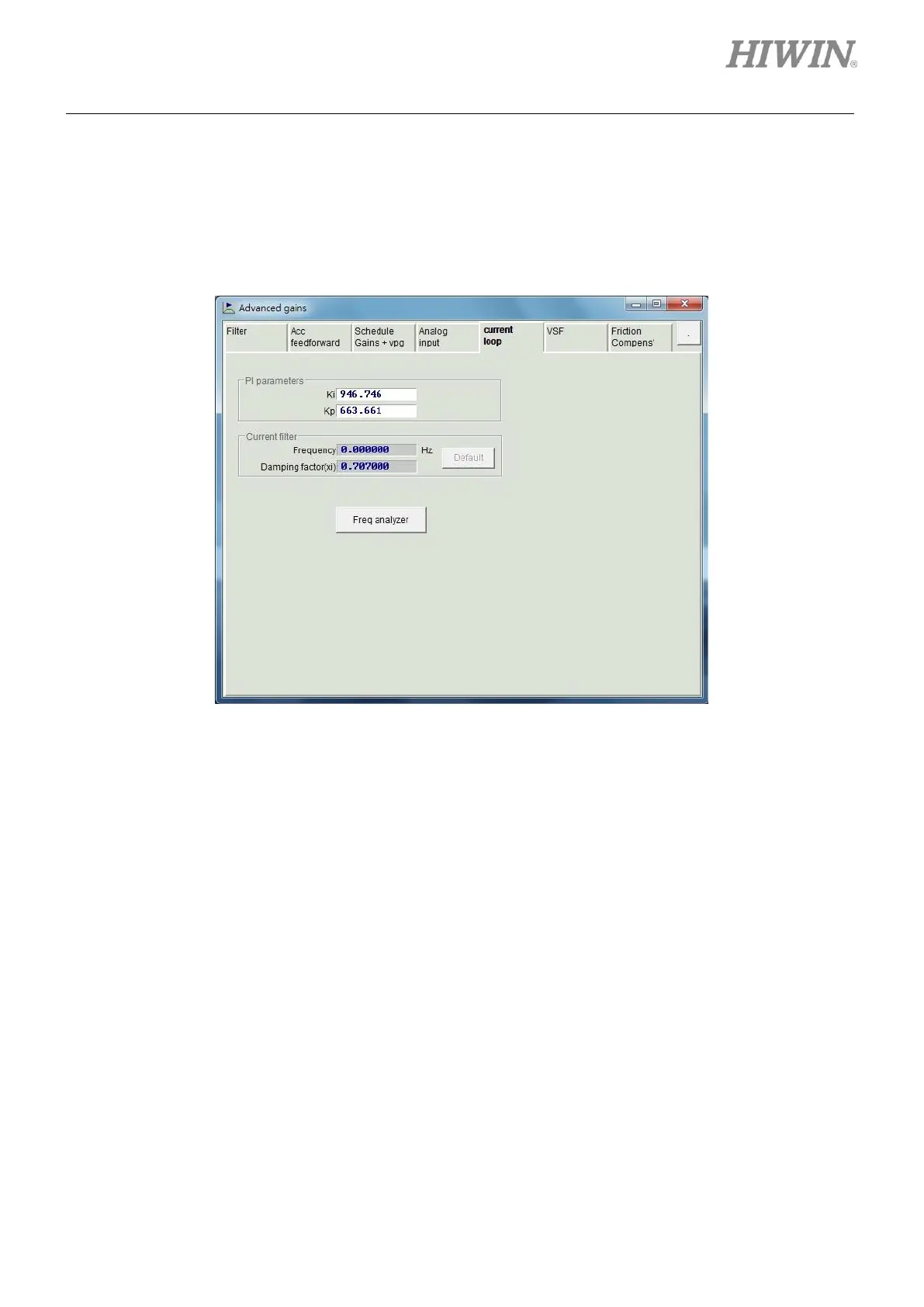
6.6.5 Current loop
The gains (Ki and Kp) of current loop are calculated based on motor parameters when motor type is
selected in Configuration center, and do not need to be adjusted again. However, if the motor parameters
are not correctly set, user can use these gains for adjustment.
Figure6.6.5.1 Current loop
6.6.6 Vibration suppression filter
Vibration suppression filter (VSF) is used to suppress the vibration during motion. For instance, when
motor is used with robotic arm with end effector, vibration could be greater during motion. User can set
Frequency and VSF factor in VSF tab of Advanced gains window. Check the checkbox of enable VSF
to suppress vibration. The setting range of Frequency is from 0.1 to 200 Hz. The setting range of VSF
factor is from 0.7 to 1.5. Normally it is suggested to set VSF factor to 1.0, as the default value. Please be
noted that do not check or uncheck the checkbox of enable VSF when motor is moving. Otherwise,
unexpected vibration or error may occur. Below are the instructions of finding vibration frequency and
enabling vibration suppression filter (VSF).