3.8 I/O Signals
A3-110
ME0384-4A
Target position
Push width
start position
[16] Push-motion specification (PUSH) PLC output signal
Operation mode
Direct numerical control
Simple direct
Positioner 1 Positioner 2 Positioner 3 Positioner 5
○: Y
: N
○ × × × × ×
Executing a travel command after turning this signal ON will activate push-motion operation.
When this signal is OFF, normal positioning operation will be performed.
The 24V driver unit is capable to select the pressing method in Parameter No. 181 “Pressing
Type” from the pressing type same as the CON system such as PCON controller and the
pressing type same as the SEP system such as PSEP.
(Note)
Refer to page B6-50 for the
selection method.
Note : The pressing method for the 200V driver unit is the CON type only.
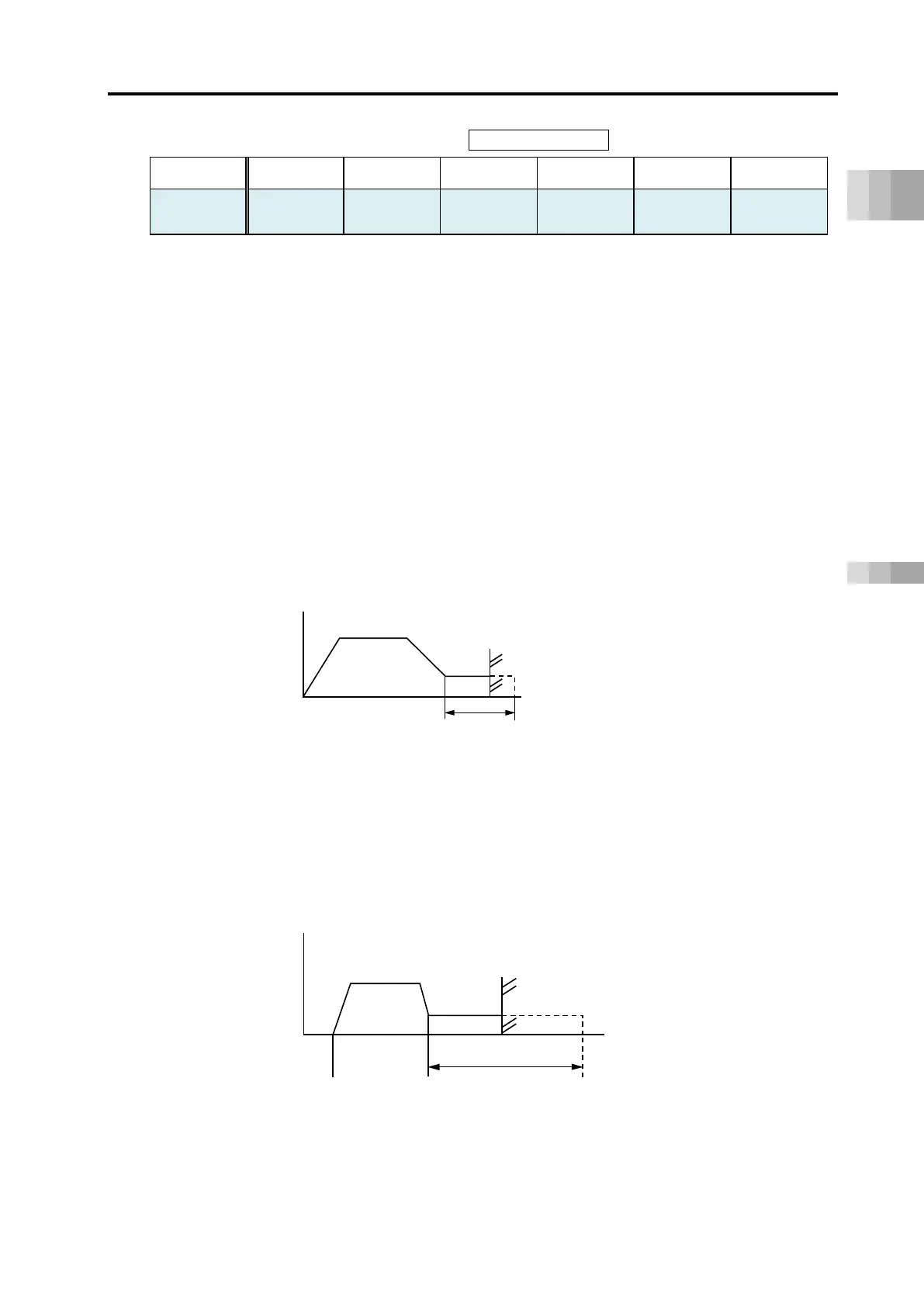
(1) CON mode push
After reaching the target position
(Note 1)
from the current position, the actuator moves with the
pressing speed for the distance set as the positioning band width
(Note 2)
.
During push motion, once the workpiece is pushed against and the push is judged to be
completed, positioning complete signal PEND will turn ON.
(2) SEP mode push
Push-motion operation is performed at the distance set in the positioning width
(Note 2)
(direct
numerical control mode) from the target position
(Note 1)
as the start position. Note that there is no
pull-operation mode.
During push motion, once the workpiece is pushed against and the push is judged to be
completed, PEND will turn ON.
Note 1 : It should be the value input in the position data indication register for direct indication
and the simple direct mode.
Note 2 : It should be the value input in the positioning band width indication register in the direct
indication mode.
(Max. Movement Amount by Pressing Operation)
Position where workpiece is pushed against and push is judged
to be completed, and positioning complete signal turns ON
Position where workpiece is pushed against and push is judged
to be completed, and positioning complete signal turns ON
Target position

 Loading...
Loading...




