3.7 Address Configuration
A3-64
ME0384-4A
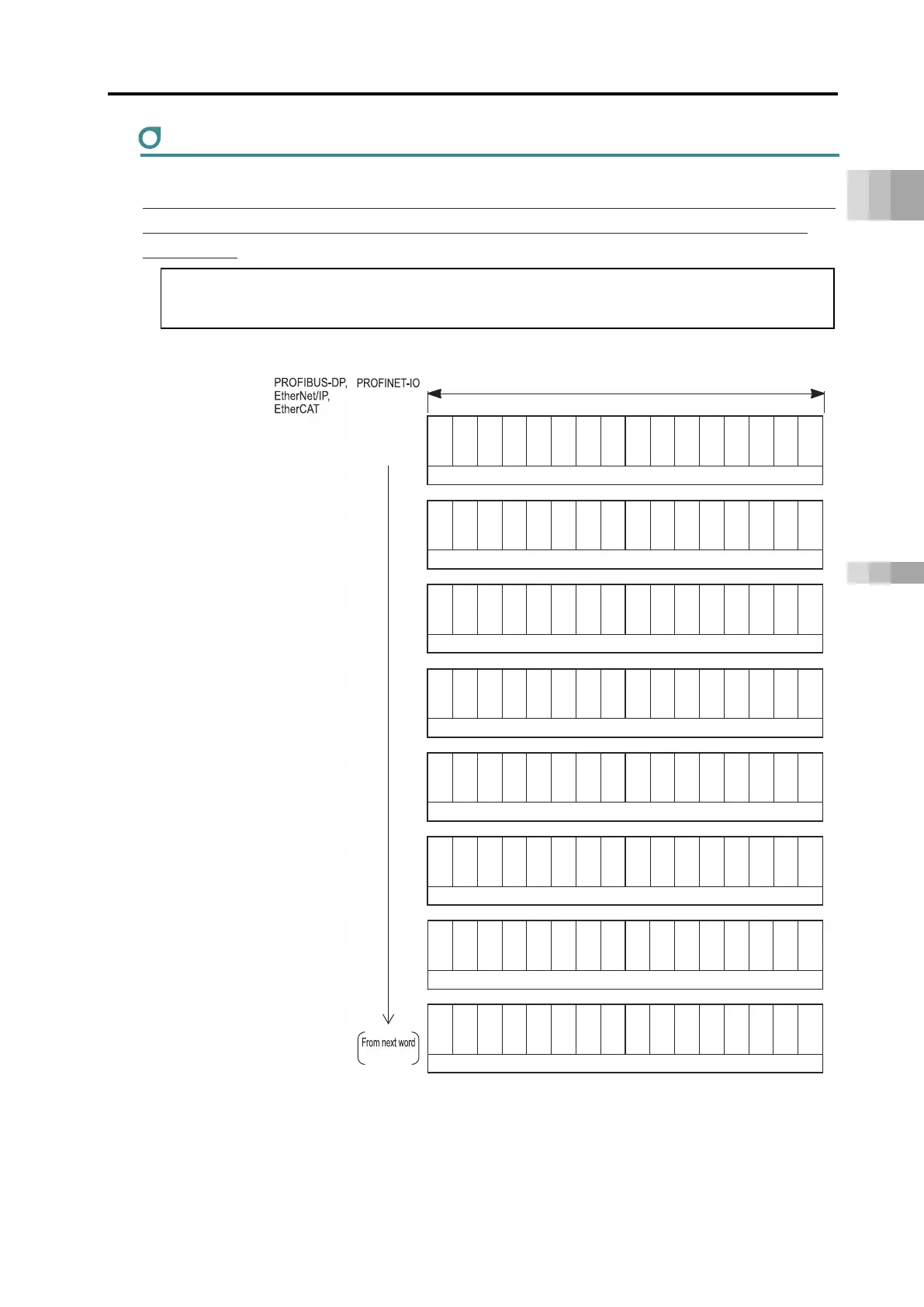
Direct numerical control mode assignment
Assigning the direct numerical control mode is as follows.
Set the current limit value in push-motion, acceleration/deceleration and speed within the range
of the applicable actuator specifications, and set the target position data within the software
stroke range.
PLC output = Axis control signal
Address
*
* m is the head register address of each axis. n is the head relative address of each axis.
p is the head module address of each axis.
CC-Link, CC-Link IE Field, and DeviceNet have word addresses, PROFIBUS-DP, EtherNet/IP, and
EtherCAT use byte addresses, and PROFINET-IO uses 4-word module addresses.
Setting units: Current limit value = 1%, Acceleration/deceleration = 0.01 G, Speed = 1.0
mm/s or 0.1 mm/s, Position data/Positioning width = 1/100 mm
b15
b14
b13
b12
b11
b10
b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
Specified position data (signed integer)
Specified position data (signed integer)
512
256
128
64
32
16
8
4
2
1
-
-
-
-
-
-
-
-
-
-
-
-
512
256
128
64
32
16
8
4
2
1
Acceleration/deceleration
-
-
-
-
-
-
-
256
128
64
32
16
8
4
2
1
Pushing current limit value
INC
DIR
-
-
-
-
RES
STP
512
256
128
64
32
16
8
4
2
1
-Link IE
RWw
RWw
RWw
RWw
RWw
RWw
RWw
RWw

 Loading...
Loading...




