6.2 Various Functions
B6-72
ME0384-4A
Collision detection function
This function stops the operation immediately when the actuator comes into contact with an
object.
Fully understand the descriptions in this section and use without any safety or operational issues.
The collision detection function is a function to stop operation by generating an alarm and
turning the servo OFF when the command current value exceeds the set value. Detection range
can also be set.
Caution
● This is an auxiliary function to reduce damage to workpieces, etc. in case of
unexpected events.
● This feature is not used in the direct indication mode.
● No compensation will be offered for unexpected damages.
● This function must be set in accordance with expected collisions, therefore appropriate
values vary depending on the system. Check thoroughly before use.
[Collision Judgment]
When the present position is within the position zone range and the time set in parameter No.
50 "Load output judgment time" is exceeded and the command torque value set in the position
table "Threshold" is exceeded, a collision is judged to have happened.
After judgment, the load output judgment status (LOAD) turns ON, the collision detection alarm
is generated and the servo turns OFF.
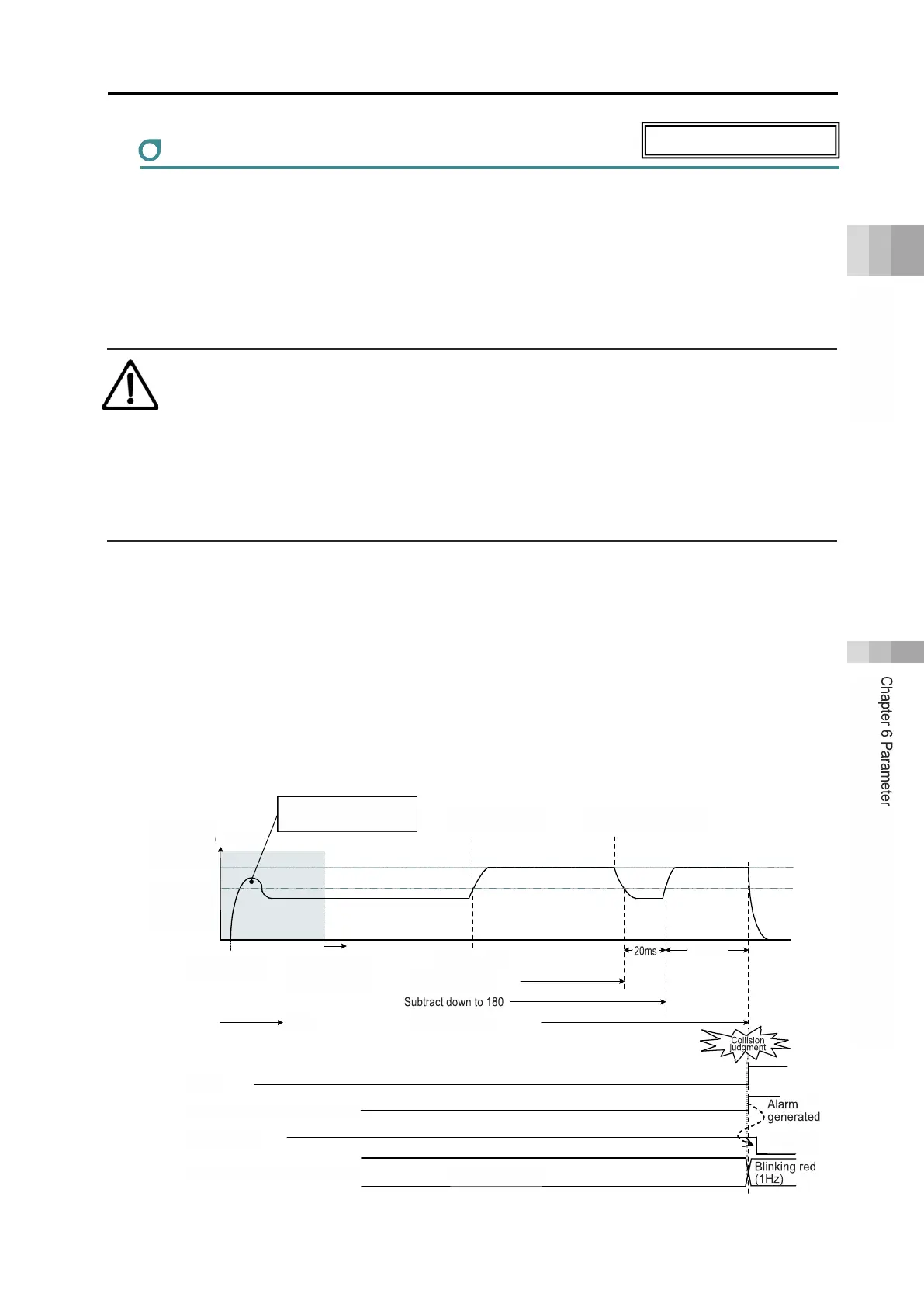
◎ Example of Judgment (at judgment time of 255 ms)
Due to load fluctuation
current drops
Due to outside range
not counted
Current
limit value
when
traveling
"Threshold"
Set current
value
Position zone
Within range
(judgment start)
Collision detection alarm (0DF)
Blinking green
Controller status indicator LED
Stepper motor specification only

 Loading...
Loading...




