2.4 Driver Unit/Simple Absolute Unit Alarm Causes and Countermeasures
C2-15
ME0384-4A
Chapter 2 Troubleshooting
Alarm name Causes/countermeasures
Cause: 1) Travel command for position No. with target position not set
in position table position field was issued.
2) Target position value in "Position" field exceeds Parameter
No. 3, 4 "Soft Limit Setting Value".
3) Push-motion operation was specified while the damping
control function was enabled.
Countermeasure: 1) Set the target position.
2)
Bring the target position value within the software
limit set value.
3) The damping control function and push-motion
operation cannot be used at the same time. Set
so that only one of the functions is enabled.
information data error
Cause: 1) The command value at direct numerical command exceeds
the set maximum value.
2) Push-motion operation was specified while the damping
control function was enabled.
Countermeasure: 1) The code of the command item exceeding the
detailed address is displayed. Refer to these
values and enter the appropriate values.
Detailed address
(Command item code)
Command item
Pushing current limit value
2) The damping control function and push-motion
operation cannot be used at the same time. Set
so that only one of the functions is enabled.
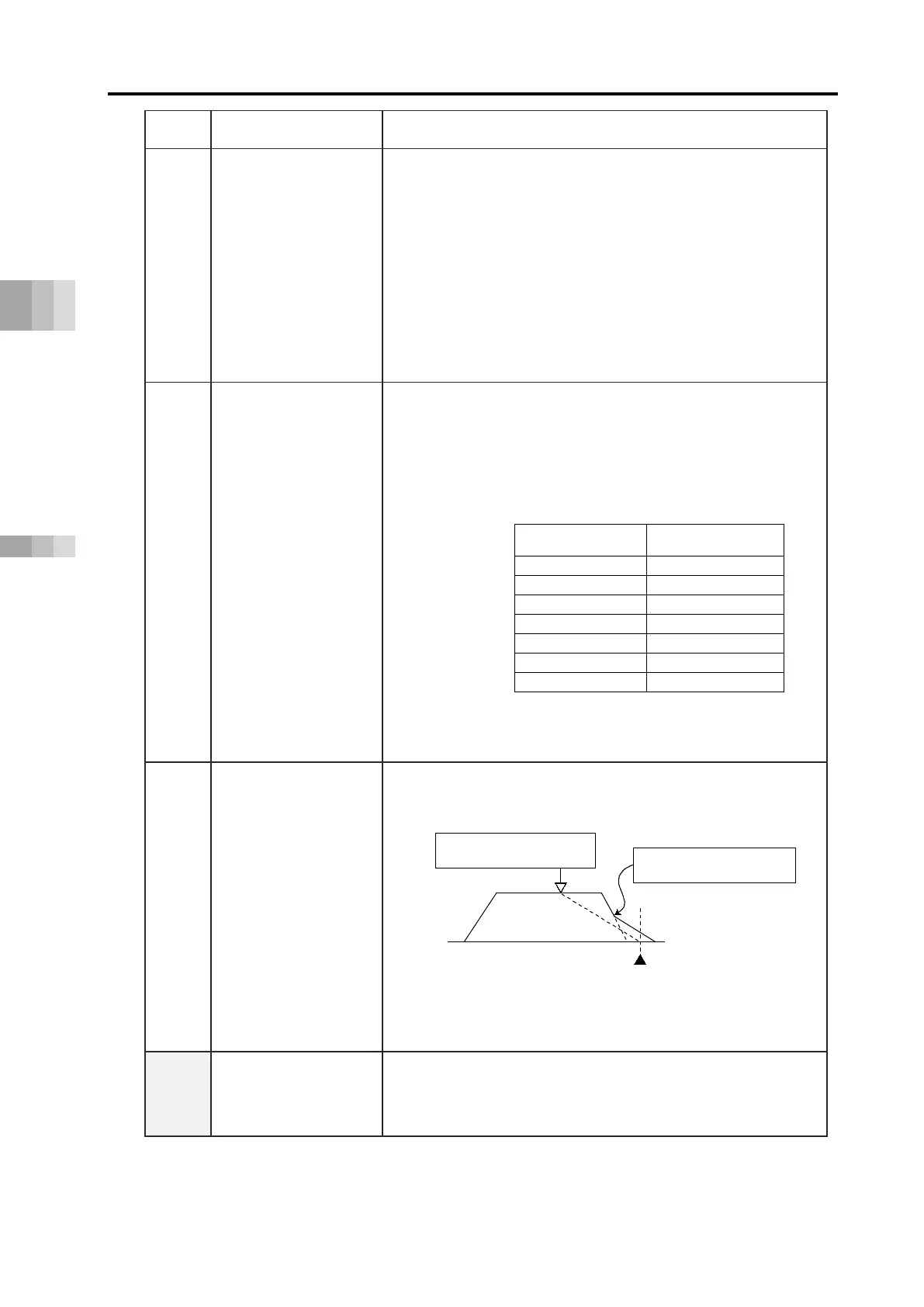
error
Cause: Insufficient deceleration distance when deceleration has been
reduced during travel. The software limit has been exceeded
when decelerating from the current position after the change.
This occurs because the timing of the next travel command
when changing the speed during travel is delayed.
Countermeasure:
Set the travel command timing for deceleration change faster.
0B5
A
Driver
Z-phase position error Cause: The position where Z-phase was detected during home return
was outside the specified range. There is a possibility of
encoder failure.
Countermeasure: Contact IAI.
Deceleration start position when
software limit is not exceeded
Commands given at this position
will exceed the software limit

 Loading...
Loading...




