Re-execution of Motion Control Instructions
Restarting with Enable in the Same Direction
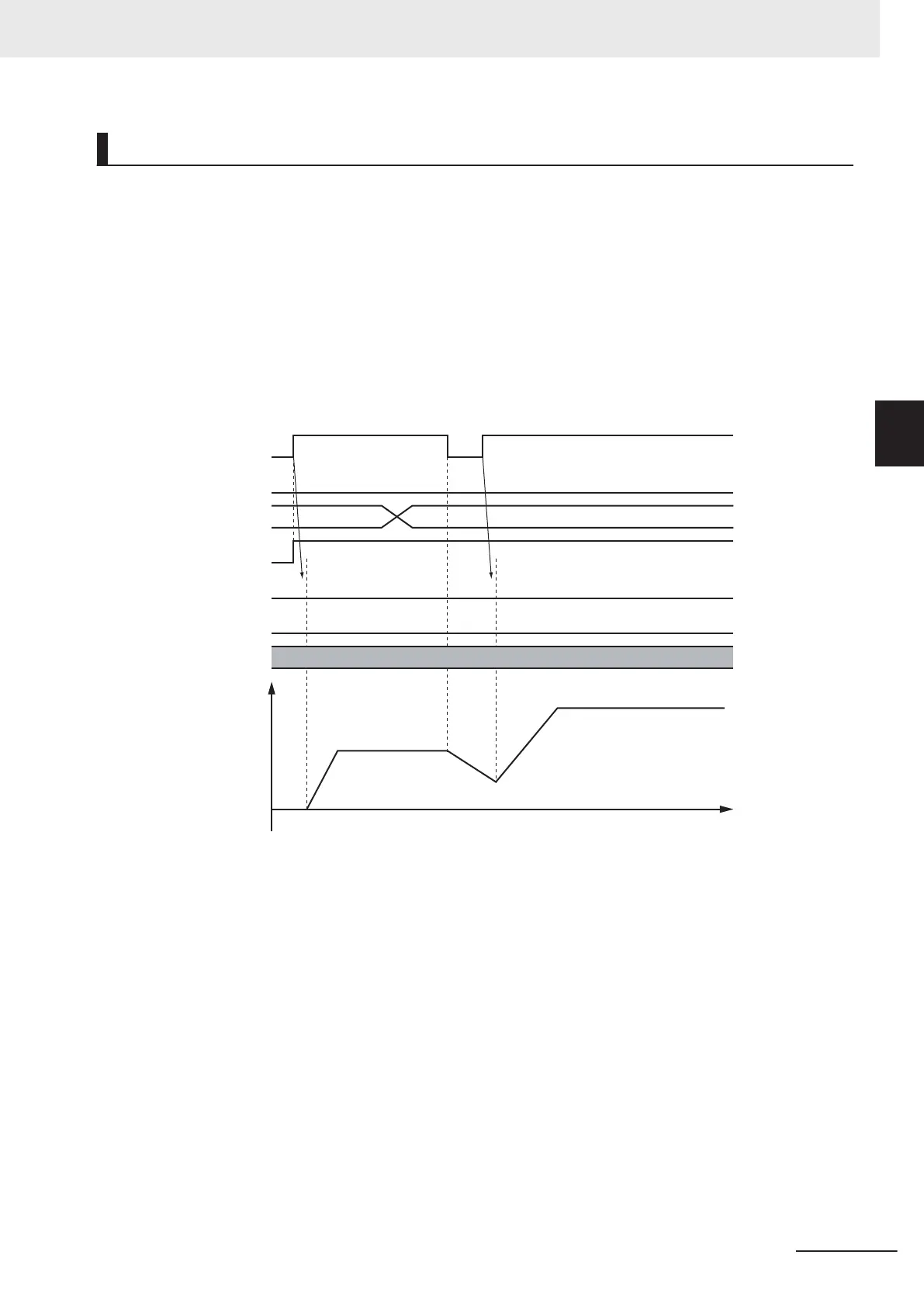
If you change PositiveEnable (Positive Direction Enable) or NegativeEnable (Negative Direction Ena-
ble) to TRUE when it is F
ALSE and the axis is decelerating, the axis will begin to accelerate towards
the target velocity.
If you change the Velocity (Target Velocity), Acceleration (Acceleration Rate), or Deceleration (Decel-
eration Rate) at this time, the new value of the input parameter is used in operation.
The axis is not stopped, and Busy (Executing) does not change to FALSE.
The following example shows operation when PositiveEnable (Positive Direction Enable) changes to
TRUE during deceleration.
Velocity
Time
Busy
NegativeEnable
CommandAborted
Error
ErrorID
PositiveEnable
Velocity
Velocity1 Velocity2
Velocity1
Velocity2
16#0000
Restarting with Enable in the Opposite Direction
If you change NegativeEnable (Negative Direction Enable) to TRUE when PositiveEnable (Positive Di-
rection Enable) is TRUE and the axis is jogging in the positive direction, the axis will reverse its direc-
tion and start jogging in the negative direction.
When this happens, you can jog the axis with the input variables for when NegativeEnable (Negative
Direction Enable) changes to TRUE. The input variables are V
elocity (Target Velocity), Acceleration
(Acceleration Rate), and Deceleration (Deceleration Rate).
The deceleration rate when the axis direction is reversed and the acceleration rate after it is reversed
follow the input variables for when NegativeEnable (Negative Direction Enable) changes to TRUE, re-
gardless of the Operation Selection at Reversing axis parameter.
When NegativeEnable (Negative Direction Enable) is TRUE and the axis is jogging in the negative di-
rection, the same operation occurs when PositiveEnable (Positive Direction Enable) changes to
TRUE.
3 Axis Command Instructions
3-15
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveJog
3
Function