Name Data type Default Comment
Pwr_Status BOOL FALSE This variable is assigned to the Status output
variable from the PWR instance of the MC_Pow-
er instruction. This variable changes to TRUE
when the Servo is turned ON.
StartPg BOOL FALSE The Servo is turned ON if this variable is TRUE
and EtherCA
T process data communications are
established.
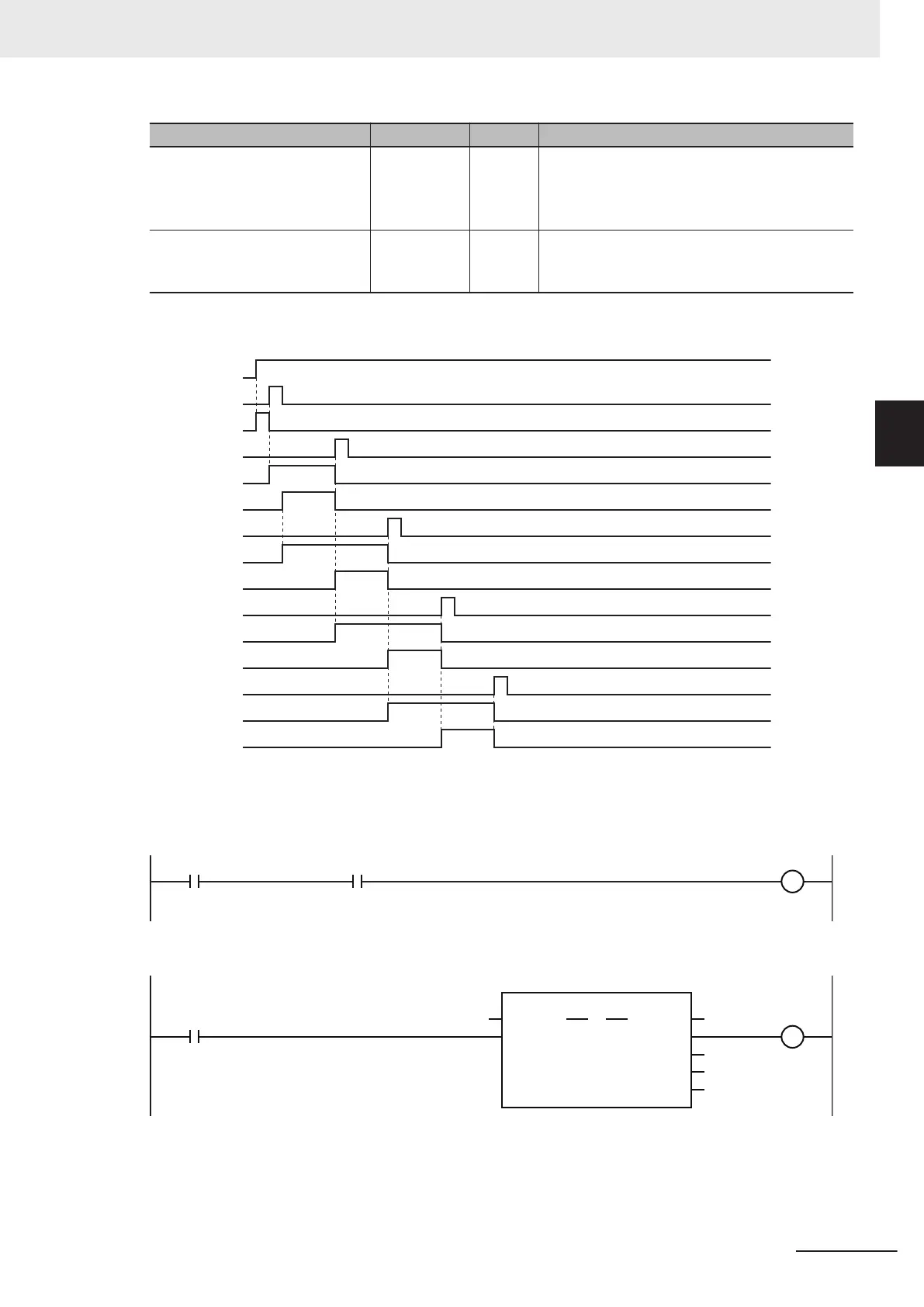
Timing Chart
Pwr_Status
Hm_D
Hm_Bsy
Mv_Abs1_D
Mv_Abs1_Bsy
Mv_Abs1_Act
Mv_Abs2_D
Mv_Abs2_Bsy
Mv_Abs2_Act
Mv_Abs3_D
Mv_Abs3_Bsy
Mv_Abs3_Act
Mv_Zero_D
Mv_Zero_Bsy
Mv_Zero_Act
Sample Programming
StartPg
Lock1
MC_Axis000.DrvStatus.ServoReady
If StartPg is TRUE, check that the Servo Drive is ready.
Lock1
PWR
Error
Axis
Axis
Enable Status
Busy
MC_Power
ErrorID
MC_Axis000
Pwr_Status
Pw
r_Bsy
Pwr_Err
Pwr_ErrID
If the Servo Drive is ready, the Servo is turned ON.
3 Axis Command Instructions
3-63
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveAbsolute
3
Sample Programming 1