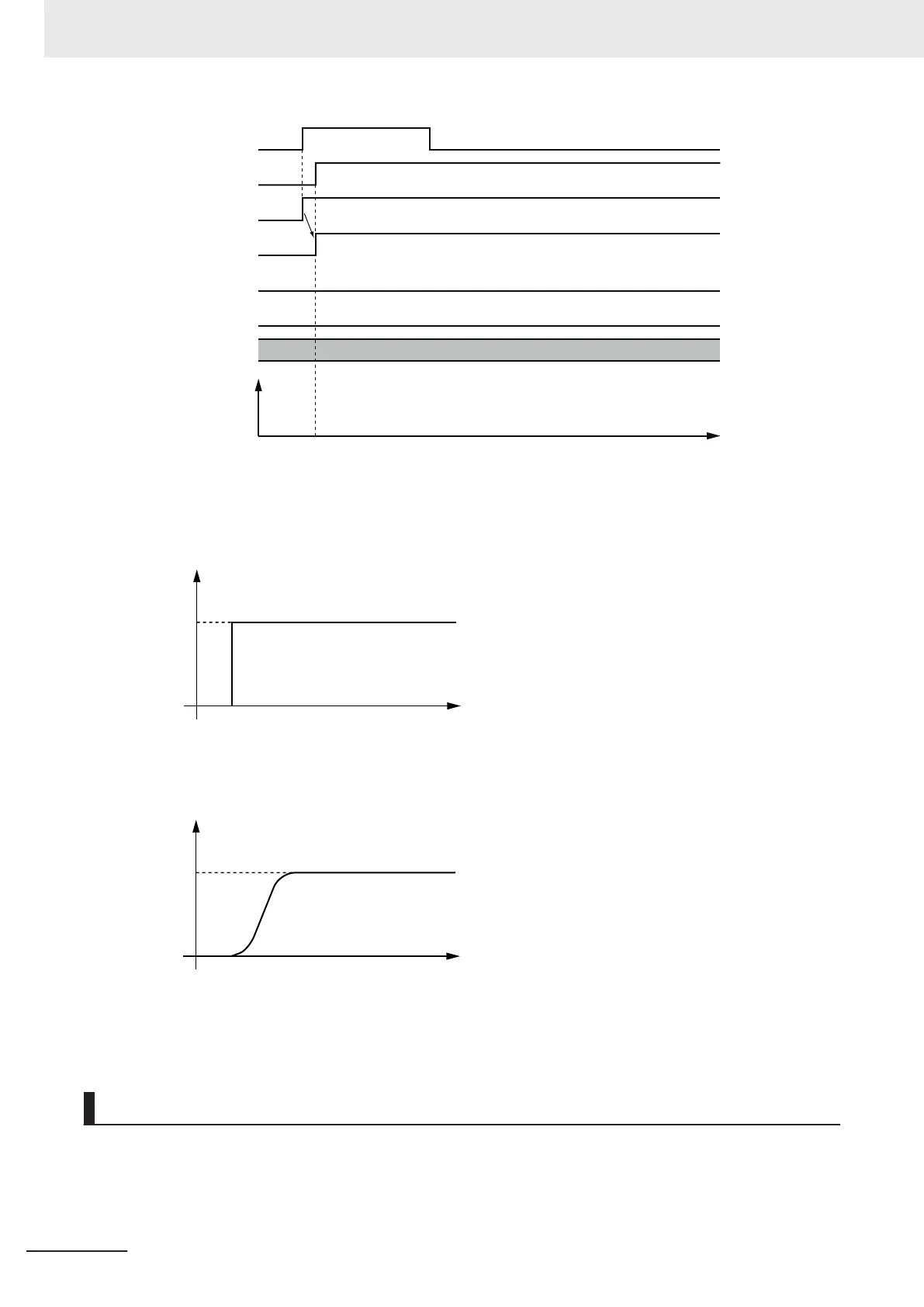
Busy
CommandAborted
InVelocity
Error
16#0000
ErrorID
Execute
Active
Time
Target velocity
Velocity
When the Acceleration (Acceleration Rate) or Deceleration (Deceleration Rate) is 0 and the instruction
is executed, the axis will reach the target velocity without accelerating or decelerating.
The following chart shows an operation example of when the Acceleration (Acceleration Rate) is 0.
0
Velocity
Ti
me
Target
velocity
Specify Jerk when you want to accelerate or decelerate smoothly
.
The following chart shows an operation example when Jerk is specified.
0
Velocity
Time
T
arget
velocity
For details on Jerk, refer to the NY
-series Industrial Panel PC / Industrial Box PC Motion Control
User’s Manual (Cat. No. W559).
Re-execution of Motion Control Instructions
You can change the operation of the instruction if you change an input parameter during continuous
operation and then change Execute to TRUE again.
Input variables V
elocity (Target Velocity), Acceleration (Acceleration Rate), and Deceleration (Deceler-
ation Rate) can be changed by re-executing the motion control instruction.
3 Axis Command Instructions
3-92
NY-series Motion Control Instructions Reference Manual (W561)