Name Data type Default Comment
StartPg BOOL FALSE The Servo is turned ON if this variable is TRUE
and EtherCA
T process data communications
are established.
Vel_Act BOOL FALSE This variable is assigned to the Active output
variable from the VEL instance of the
MC_MoveV
elocity instruction. It is TRUE during
velocity control by the VEL instance.
Set_Ov_Velfct LREAL 0 This is the velocity override factor.
StopTrig BOOL FALSE When this variable is TRUE, MC_Stop is exe-
cuted.
Sensor1 BOOL FALSE TRUE when chemical solution supply is detect-
ed.
If the Servo is ON for axis 1, the MC_MoveV
e-
locity (Velocity Control) instruction is executed.
Sensor2 BOOL FALSE If this variable is TRUE, the override factor is
set to 500%. After this variable changes to
TRUE, it remains TRUE until Sensor3 changes
to TRUE, at which time it changes to F
ALSE.
Sensor3 BOOL FALSE If this variable is TRUE, the override factor is
set to 200%. After this variable changes to
TRUE, it remains TRUE.
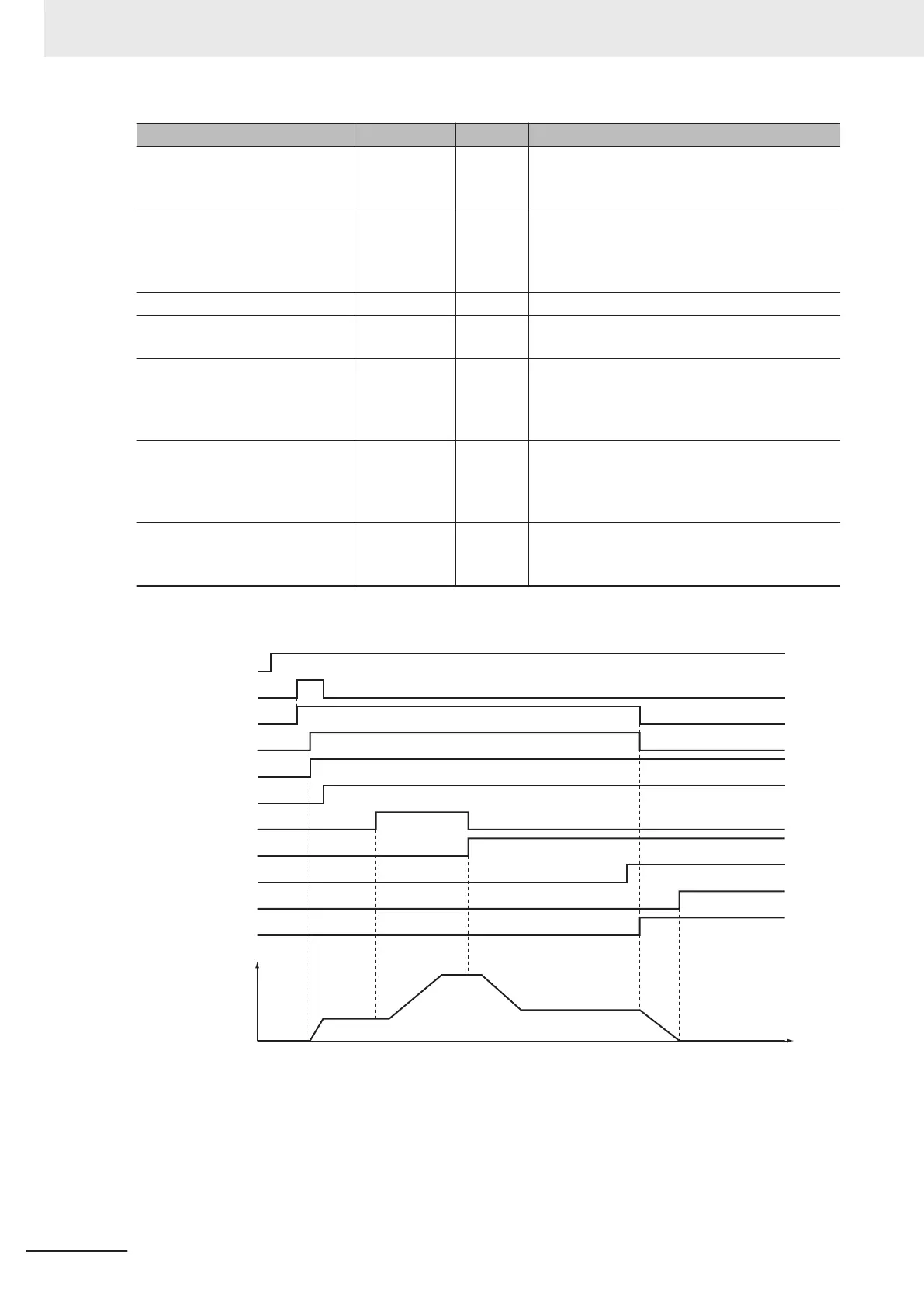
Timing Chart
Pwr_Status
Sensor1
Vel_Bsy
Vel_Act
Set_O
v_Bsy
Set_Ov_End
Sensor2
Sensor3
StopTrig
Stp_D
Stp_Act
MC_Axis000
Command velocity
Time
3 Axis Command Instructions
3-96
NY-series Motion Control Instructions Reference Manual (W561)