Sample Programming
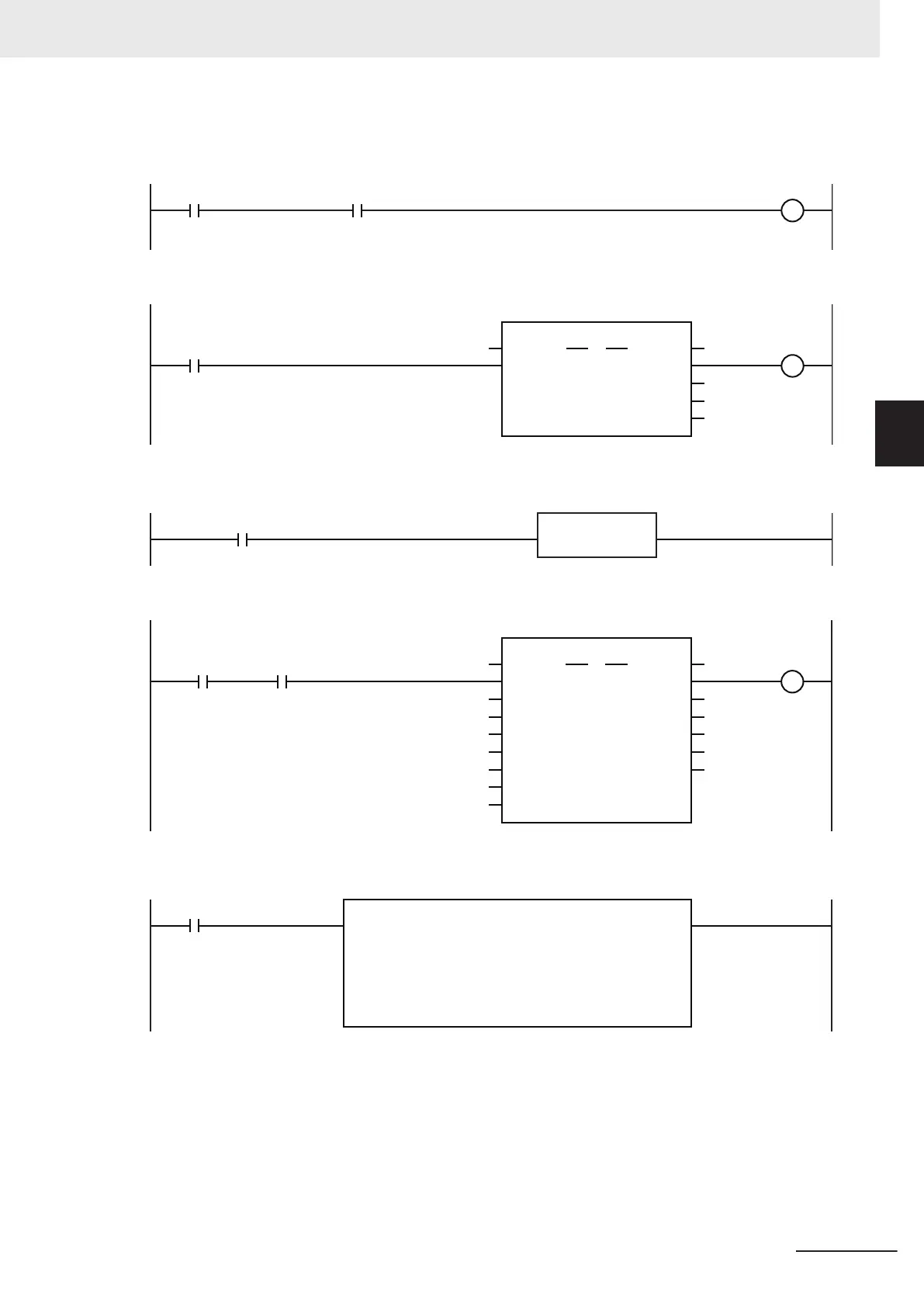
StartPg
Lock1
MC_Axis000.D
rvStatus.Ready
If StartPg is TRUE, check that the Servo Drive is ready.
PWR
Error
Axis
Axis
Enable Status
Busy
MC_Power
ErrorID
Lock1
MC_Axis0
00
Pwr_Status
Pwr_Bsy
Pwr_Err
Pwr_ErrID
If the Servo Drive is ready, the Servo is turned ON.
FaultHandlerMC_Axis000.MFaultLvl.Active
FaultHandlerEN
If a minor fault level error occurs for axis 1, the error handler for the device (FaultHandler) is executed.
Program the FaultHandler according to the device.
Vel_InVel
Pwr_Status Sensor1
MC_Axis000
BufferMode
VEL
Jer
k
Active
Axis Axis
Execute
InVelocity
Velocity
Busy
Deceleration
Error
Direction
Continuous
MC_MoveVelocity
Acceleration
CommandAborted
ErrorID_eMC_DIRECTION#_mcPositiveDirection
LREAL#1048576.0
LREAL#1048576.0
LREAL#1048576.0
Vel_Bsy
Vel_Act
Vel_Ca
Vel_Err
Vel_ErrID
When Sensor1 changes to TRUE, the MC_MoveVelocity (Velocity Control) instruction is executed.
Vel_Act
During execution of the MC_MoveVelocity (Velocity Control) instruction, the override factor is changed
according to the status of the Sensor2 and Sensor3 bits.
Note: The contents of the inline ST are given below.
3 Axis Command Instructions
3-97
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveVelocity
3
Sample Programming