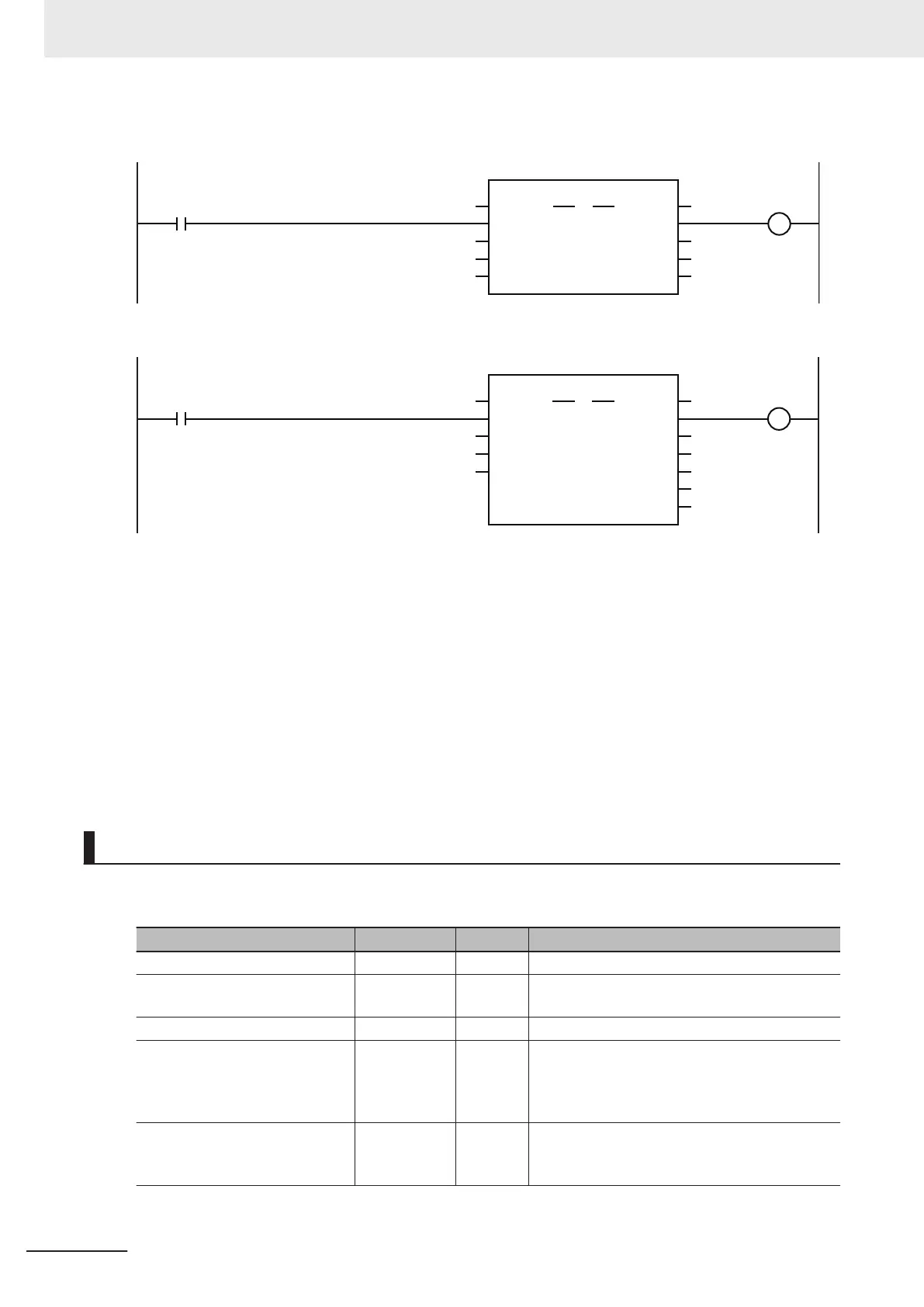
MC_Axis000
Vel
_Act
Set_Ov_End
Set_Ov_Velfct Set_Ov_Bsy
SET_OV
Axis
Axis
Enable
Enabled
VelFactor
JerkFactor
Error
ErrorID
MC_SetOverride
AccFactor
Busy
Set_Ov_Err
Set_Ov_ErrID
The MC_SetOverride (Set Override Factors) instruction is executed during execution of the
MC_MoveVelocity (Velocity Control) instruction.
StopTrig
LREAL#524288.0
Stp_Act
STP
Axis Axis
Execute Done
Deceleration
BufferMode
Error
ErrorID
CommandAborted
Active
MC_Stop
Jerk
Busy
MC_Axis000
Stp_D
Stp_Bsy
Stp_Ca
Stp_Err
Stp_ErrID
When the stop command (StopTrig) changes to TRUE, the MC_Stop instruction is executed.
Contents of Inline ST
IF (Sensor2=FALSE) AND (Sensor3=FALSE) THEN
Set_Ov_Velfct := LREAL#100.0;
ELSIF (Sensor2=TRUE) AND (Sensor3=FALSE) THEN
Set_Ov_Velfct := LREAL#500.0;
ELSIF (Sensor2=FALSE) AND (Sensor3=TRUE) THEN
Set_Ov_Velfct := LREAL#200.0;
ELSE
Set_Ov_Velfct := LREAL#200.0;
END_IF;
Structured Text (ST)
Main Variables
Name Data type Default Comment
MC_Axis000 _sAXIS_REF --- Axis Variable for axis 1.
MC_Axis000.MFaultLvl.Active BOOL FALSE TRUE while there is a minor fault level error for
axis 1.
MC_Axis000.Details.Homed BOOL FALSE TRUE when home is defined for axis 1.
Pwr_Status BOOL FALSE This variable is assigned to the Status output
variable from the PWR instance of the
MC_Power instruction. This variable changes to
TRUE when the Servo is turned ON.
StartPg BOOL FALSE The Servo is turned ON if this variable is TRUE
and EtherCA
T process data communications
are established.
3 Axis Command Instructions
3-98
NY-series Motion Control Instructions Reference Manual (W561)