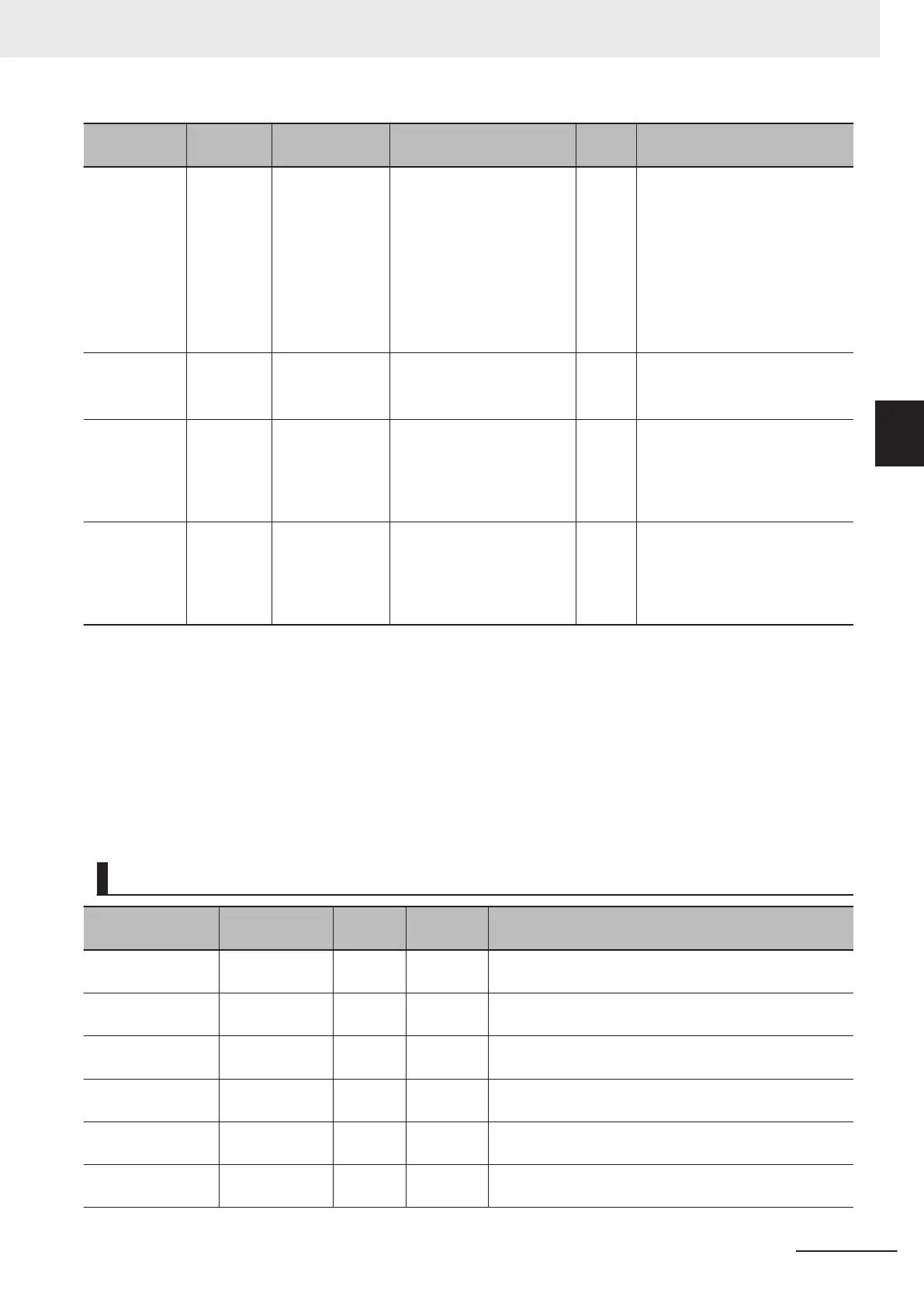
Name Meaning Data type Valid range
De-
fault
Description
FeedDistance Feed Dis-
tance
LREAL Negative number, positive
number
, or 0
0 Specify the travel distance after
the interrupt feed input.
Specify a positive value to feed
in the same direction as the axis
was moving before the interrupt
input and specify a negative val-
ue to feed in the opposite direc-
tion.
The unit is command units.
*1
FeedVelocity Feed Ve-
locity
LREAL Positive number 0 Specify the target travel velocity
after the interrupt feed input.
The unit is command units/s.
*1
BufferMode Buffer
Mode Se-
lection
_eMC_BUF-
FER_MODE
0: _mcAborting
1: _mcBuf
fered
0
*2
Specify the behavior when exe-
cuting more than one motion in-
struction.
0: Aborting
1: Buffered
ErrorDetect Error De-
tection Se-
lection
BOOL TRUE or FALSE FALSE Specify whether to detect an er-
ror when there is no interrupt
feed input.
TRUE: Detect errors.
F
ALSE: Do not detect errors.
*1. Refer to Unit Conversion Settings in the NY-series Industrial Panel PC / Industrial Box PC Motion Control User’s
Manual (Cat. No. W559) for information on command units.
*2. The default value for an enumeration variable is actually not the number, but the enumerator.
*3. The task period is the primary period.
*4. A value of 0 can be set if MoveMode is set to 2: Velocity control.
*5. The axis moves to the specified position when MoveMode is set to 0: Absolute positioning and when the Count
Mode is Linear Mode.
When MoveMode is set to 1: Relative positioning, the travel direction is determined by the sign of the position.
1: Shortest way and 4: No direction specified cannot be selected when MoveMode is set to 2: Velocity control,
regardless of the Counter Mode.
Output Variables
Name Meaning
Data
type
Valid
range
Description
Done Done BOOL TRUE or
F
ALSE
TRUE when the instruction is completed.
InFeed Feeding BOOL TRUE or
F
ALSE
TRUE while feeding after receiving a latch input.
Busy Executing BOOL TRUE or
F
ALSE
TRUE when the instruction is acknowledged.
Active Controlling BOOL TRUE or
F
ALSE
TRUE when the axis is being controlled.
CommandAborted Command
Aborted
BOOL TRUE or
F
ALSE
TRUE when the instruction is aborted.
Error Error BOOL TRUE or
F
ALSE
TRUE while there is an error.
3 Axis Command Instructions
3-113
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveFeed
3
Variables