When the command velocity of the master axis reaches the target velocity, InV
elocity (Target Ve-
locity Reached) of the master axis changes to TRUE.
3 Executing the Slave Axis
When InV
elocity (Target Velocity Reached) of the master axis changes to TRUE, the slave axis
(axis 2) performs gear operation with a gear ratio of 1:2 against the actual position of the master
axis.
The synchronized positions are Pos1 for the master axis and Pos2 for the slave axis.
Ladder Diagram
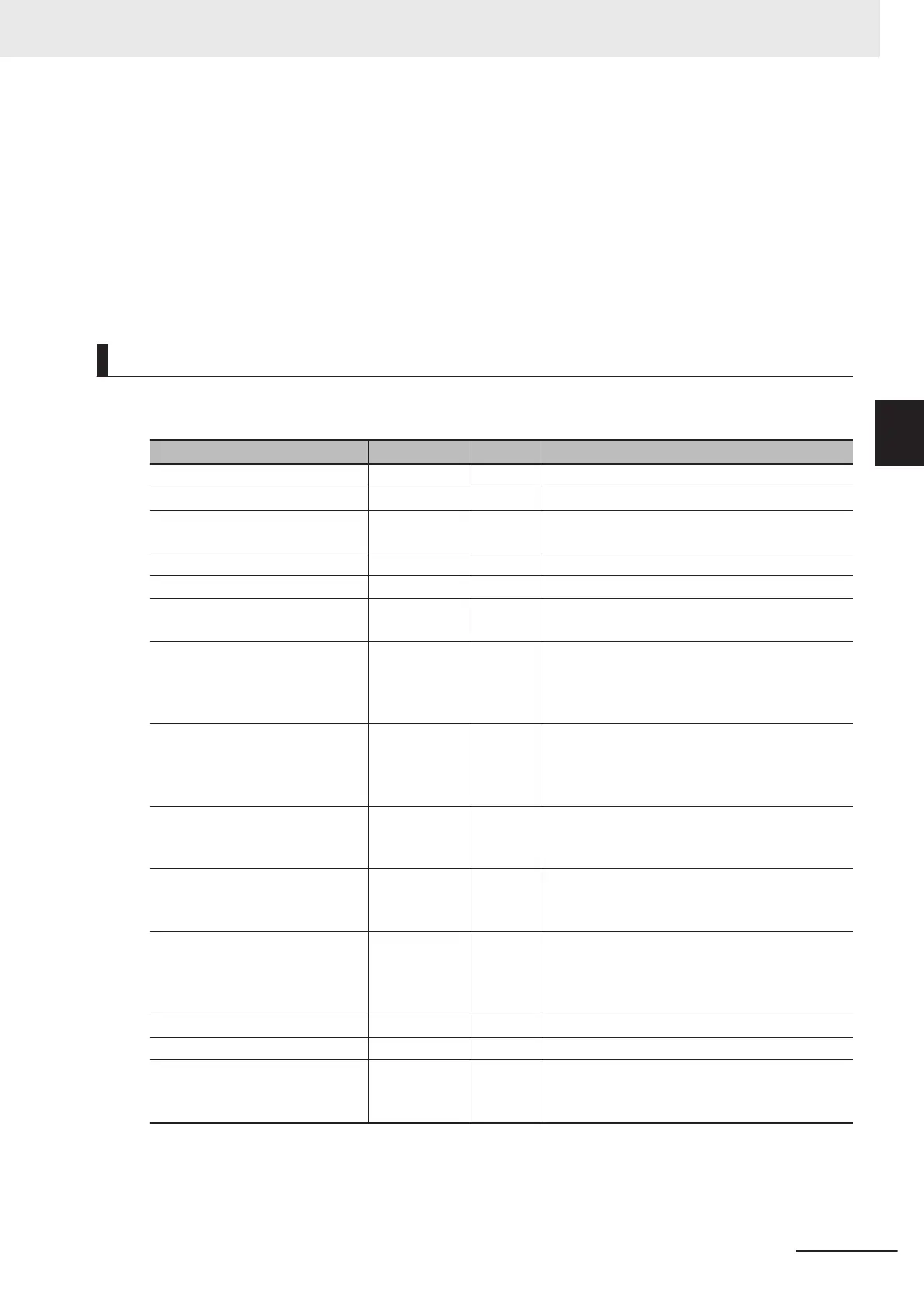
Main Variables
Name Data type Default Comment
MC_Axis000 _sAXIS_REF --- Axis Variable for the master axis, axis 1.
MC_Axis000.Details.Homed BOOL FALSE TRUE when home is defined for axis 1.
MC_Axis000.MFaultLvl.Active BOOL FALSE TRUE while there is a minor fault level error for
axis 1.
MC_Axis001 _sAXIS_REF --- Axis Variable for the slave axis, axis 2.
MC_Axis001.Details.Homed BOOL FALSE TRUE when home is defined for axis 2.
MC_Axis001.MFaultLvl.Active BOOL FALSE TRUE while there is a minor fault level error for
axis 2.
Pwr1_Status BOOL FALSE This variable is assigned to the Status output
variable from the PWR1 instance of the
MC_Power instruction. This variable changes to
TRUE when the Servo is turned ON.
Pwr2_Status BOOL FALSE This variable is assigned to the Status output
variable from the PWR2 instance of the
MC_Power instruction. This variable changes to
TRUE when the Servo is turned ON.
Hm1_D BOOL FALSE This variable is assigned to the Done output
variable from the HM1 instance of the
MC_Home instruction.
Hm2_D BOOL FALSE This variable is assigned to the Done output
variable from the HM2 instance of the
MC_Home instruction.
Vel_InVel BOOL FALSE This variable is assigned to the InV
elocity out-
put variable from the VEL instance of the
MC_MoveVelocity instruction. It is TRUE when
the target velocity is reached.
Pos1 LREAL --- This variable gives the master sync position.
Pos2 LREAL --- This variable gives the slave sync position.
StartPg BOOL FALSE The Servo is turned ON if this variable is TRUE
and EtherCA
T process data communications
are established.
3 Axis Command Instructions
3-279
NY-series Motion Control Instructions Reference Manual (W561)
MC_GearInPos
3
Sample Programming