Instruction Details
This section describes the instruction in detail.
ReferenceType (Position Type Selection)
Any of the following position types can be selected for the master axis to which the slave axis is
synchronized.
•
_mcCommand: Command position (value calculated in the previous task period)
The master axis command position that was calculated in the previous task period is used for the
current period.
The command value that was calculated for the master axis in the last periodic task is used to calcu-
late the command position of the slave axis in the current period.
• _mcFeedback: Value obtained in the same task period
The actual position of the master axis that was obtained in the same task period is used.
Precautions for Correct Use
Here, the task period is the primary period. The periodic task is the primary periodic task.
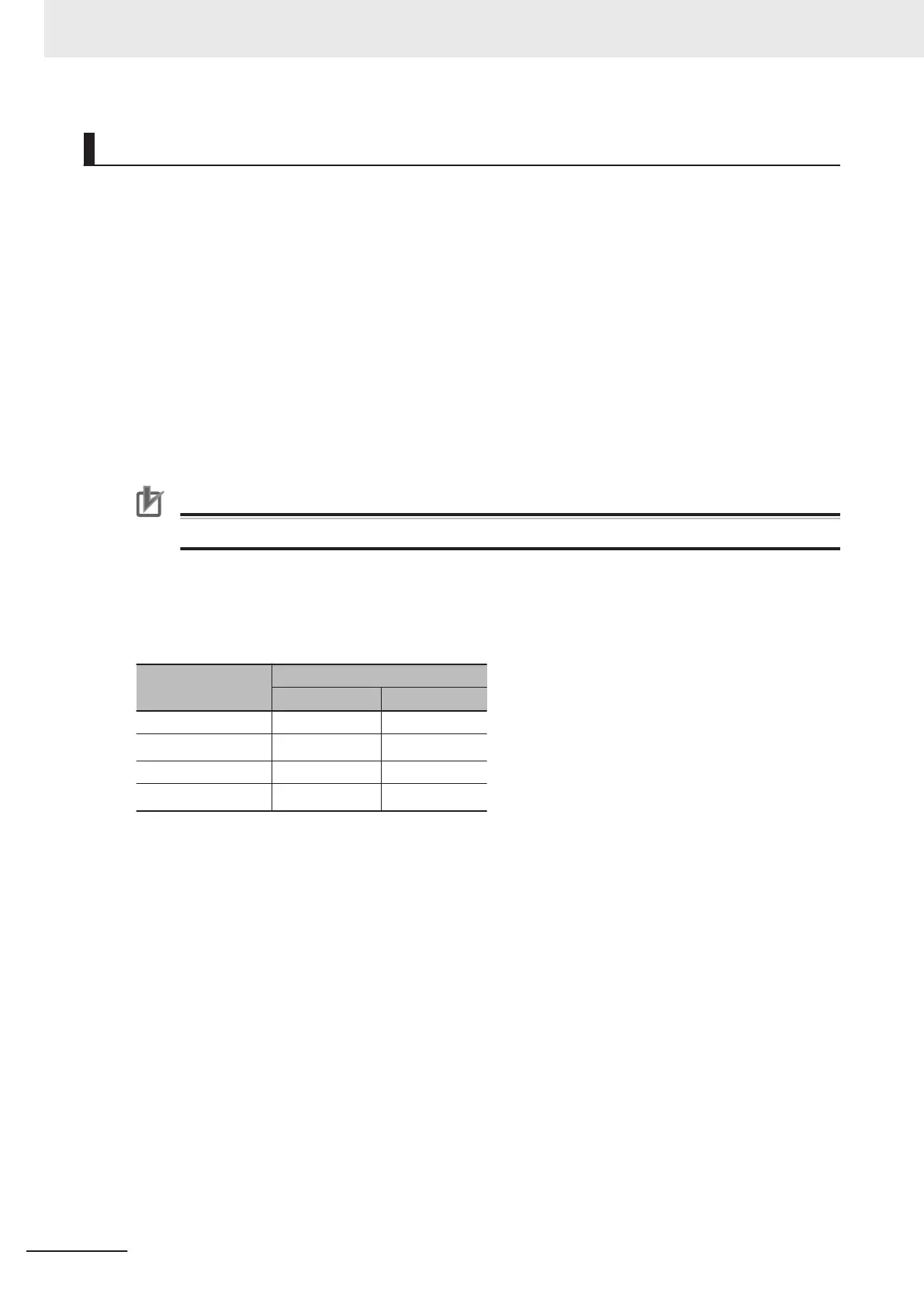
Relationship between Axis Types and Position Types
The relationship between the axis types that you can monitor and position types that is monitored is
shown below
.
Axis Type
ReferenceType
_mcCommand _mcFeedback
Servo axis OK OK
Encoder axis
No
*1
OK
Virtual servo axis OK OK
Virtual encoder axis
No
*1
OK
*1. A Position Type Selection Out of Range error (error code: 5430 hex) occurs when the instruction is execut-
ed.
Calculation Examples for DeviatedV
alue (Following Error between Axes)
The DeviatedV
alue (Following Error between Axes) is calculated as described below.
Linear Mode
ReferenceType (Position Type Selection) Set to _mcCommand
DeviatedValue (Following Error between Axes) = Command current position of Master (Master Ax-
is) - Command current position of Slave (Slave Axis)
ReferenceType (Position Type Selection) Set to _mcFeedback
DeviatedValue (Following Error between Axes) = Actual current position of Master (Master Axis) -
Actual current position of Slave (Slave Axis)
Rotary Mode
ReferenceType (Position Type Selection) Set to _mcCommand
3 Axis Command Instructions
3-388
NY-series Motion Control Instructions Reference Manual (W561)