The DeviatedV
alue (Following Error between Axes) is the shorter distance between the command
current position of the Master (Master Axis) and the command current position of the Slave (Slave
Axis) in the range of the ring counter.
The sign of the DeviatedValue (Following Error between Axes) is the sign for the shorter direction,
as given below.
• If the command current position of the Master (Master Axis) is greater than or equal to the com-
mand current position of the Slave (Slave Axis), the value is positive.
• If the command current position of the Master (Master Axis) is less than the command current
position of the Slave (Slave Axis), the value is negative.
ReferenceType (Position Type Selection) Set to _mcFeedback
The DeviatedValue (Following Error between Axes) is the shorter distance between the actual cur-
rent position of the Master (Master Axis) and the actual current position of the Slave (Slave Axis) in
the range of the ring counter.
The sign of the DeviatedValue (Following Error between Axes) is the sign for the shorter direction,
as given below.
• If the actual current position of the Master (Master Axis) is greater than or equal to the actual
current position of the Slave (Slave Axis), the value is positive.
• If the actual current position of the Master (Master Axis) is less than the actual current position of
the Slave (Slave Axis), the value is negative.
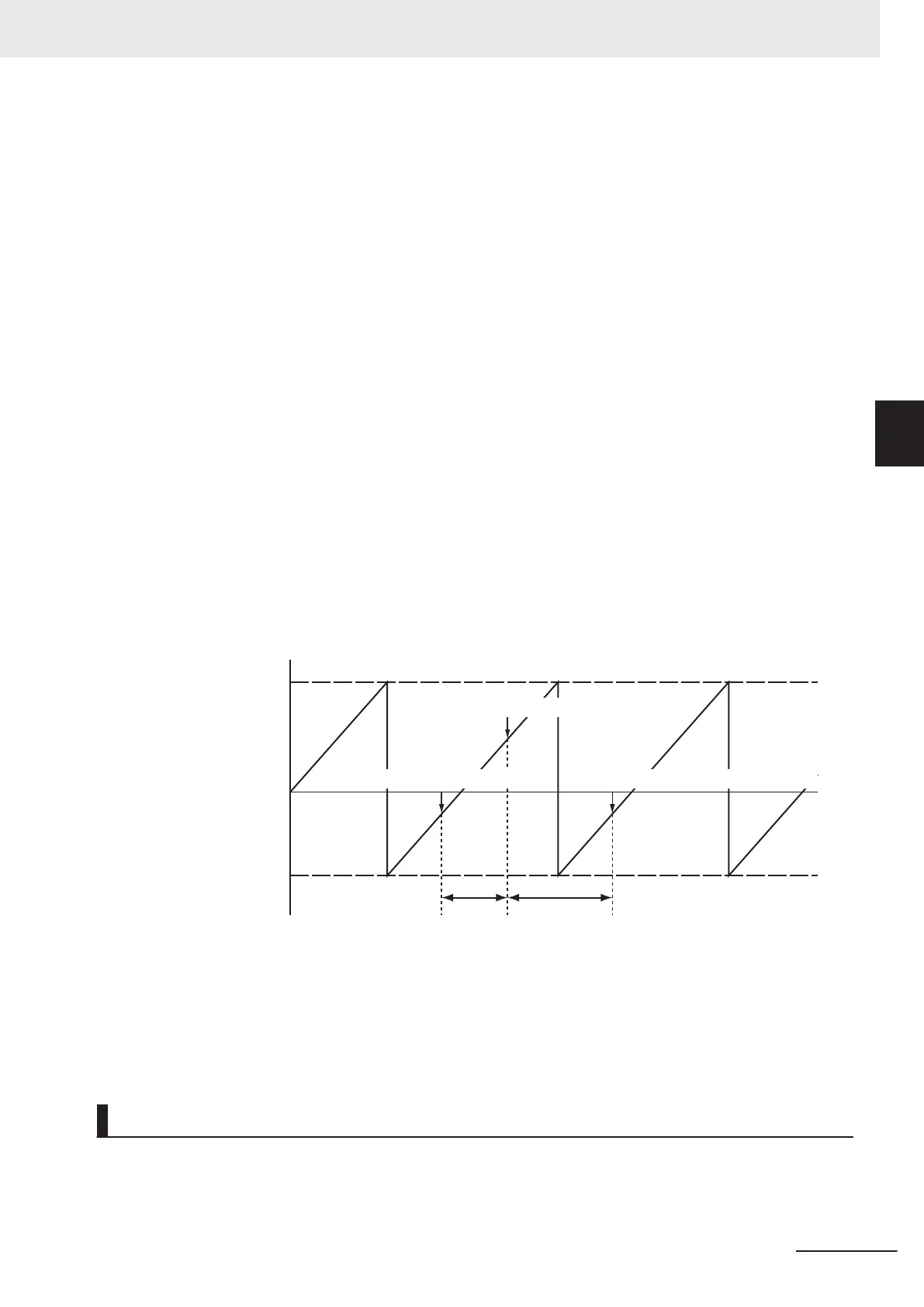
DeviatedValue (Following Error between Axes) Calculation Example in Rotary Mode when
ReferenceType (Position Type Selection) Is Set to _mcCommand
0
70 100
Slave command current position: −20
Master command current position: 50
Slave command current position: −20
|DeviatedValue| is 70 (because 70 is less than 100).
The sign is positive because the command current position of
the
Master is greater than or equal to the command current
position of the Slave, so the DeviatedValue is +70.
Mod
ulo maximum
position setting value:
100
Modulo minimum
position setting value:
−70
If ReferenceT
ype (Position Type Selection) is _mcFeedback in Rotary Mode, the "command current
position" in the above diagram would be the "actual current position".
Timing Charts
An error for this instruction does not affect the operation of the axis or axes group.
A timing chart is given below for when PermittedDeviation (Permitted Following Error) is 10.0.
3 Axis Command Instructions
3-389
NY-series Motion Control Instructions Reference Manual (W561)
MC_AxesObserve
3
Function