Precautions for Safe Use
Always use the axis at a constant velocity for the MC_DigitalCamSwitch instruction.
If you set the Count Mode to Rotary Mode, the following operation will occur if you use
OnCompensation or OffCompensation
and the axis velocity changes abruptly.
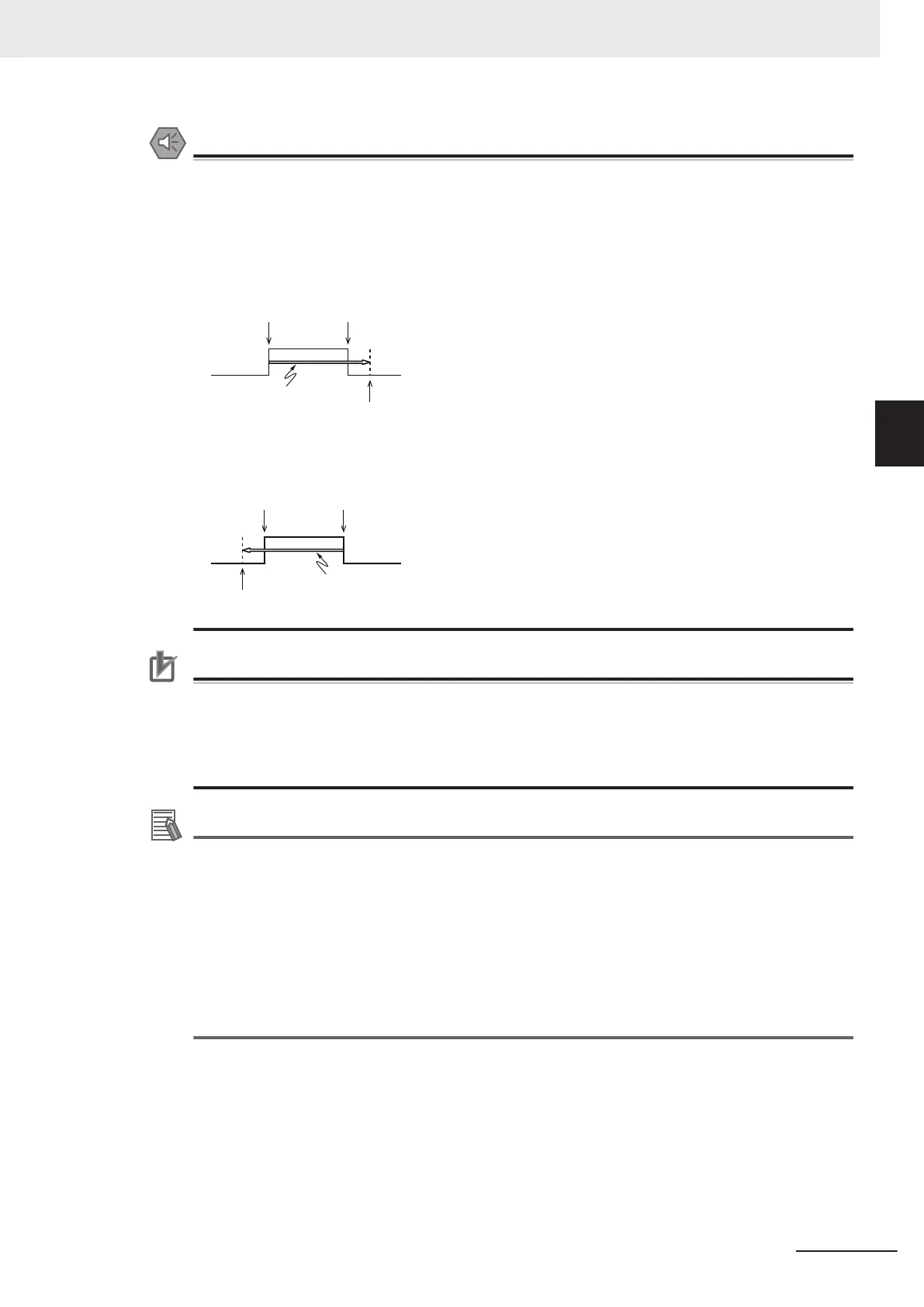
• If the value of OnCompensation or OffCompensation is equivalent to the time for half a rota-
tion or more, InOperation will be FALSE.
• If the value of OnCompensation results in exceeding LastOnPosition, the output timing will be
unstable.
FirstOnPosition LastOnPosition
OnCompensation
FirstOnPosition after compensation
• If the value of OffCompensation results in exceeding FirstOnPosition, the output timing will be
unstable.
FirstOnPosition LastOnPosition
OffCo
mpensation
LastOnPosition after compensation
Precautions for Correct Use
If you set the Count Mode to Rotary Mode and use OnCompensation or OffCompensation, set
the parameters so that the relationship between FirstOnPosition and LastOnPosition is not re-
versed.
The output timing will be unstable.
Refer to "Precautions for Safe Use", above, for operation information.
Additional Information
If the Count Mode is set to Rotary Mode, the valid range is T#-1s to T#1s, but the following
restrictions also apply to the setting.
•
Set the value within a range that does not exceed the time for half a rotation of the axis.
For example, for rotation at 500 r/min, the time for one rotation is 120 ms. The time is for half
a rotation, so set OnCompensation (ON Time Compensation) and OffCompensation (OFF
Time Compensation) to between −60 and 60 ms.
• If a value is set that exceeds the time for half a rotation of the axis, InOperation will be FALSE
and EnableOut will be FALSE. Always check the status of InOperation during application.
• If a value within the correct range is restored when InOperation is FALSE, InOperation will
change to TRUE.
The following figure shows the operation when OnCompensation (ON T
ime Compensation) is set to
T#5ms and OffCompensation (OFF Time Compensation) is set to T#10ms for the Setting Example
given on page 3-422.
3 Axis Command Instructions
3-425
NY-series Motion Control Instructions Reference Manual (W561)
MC_DigitalCamSwitch
3
Function