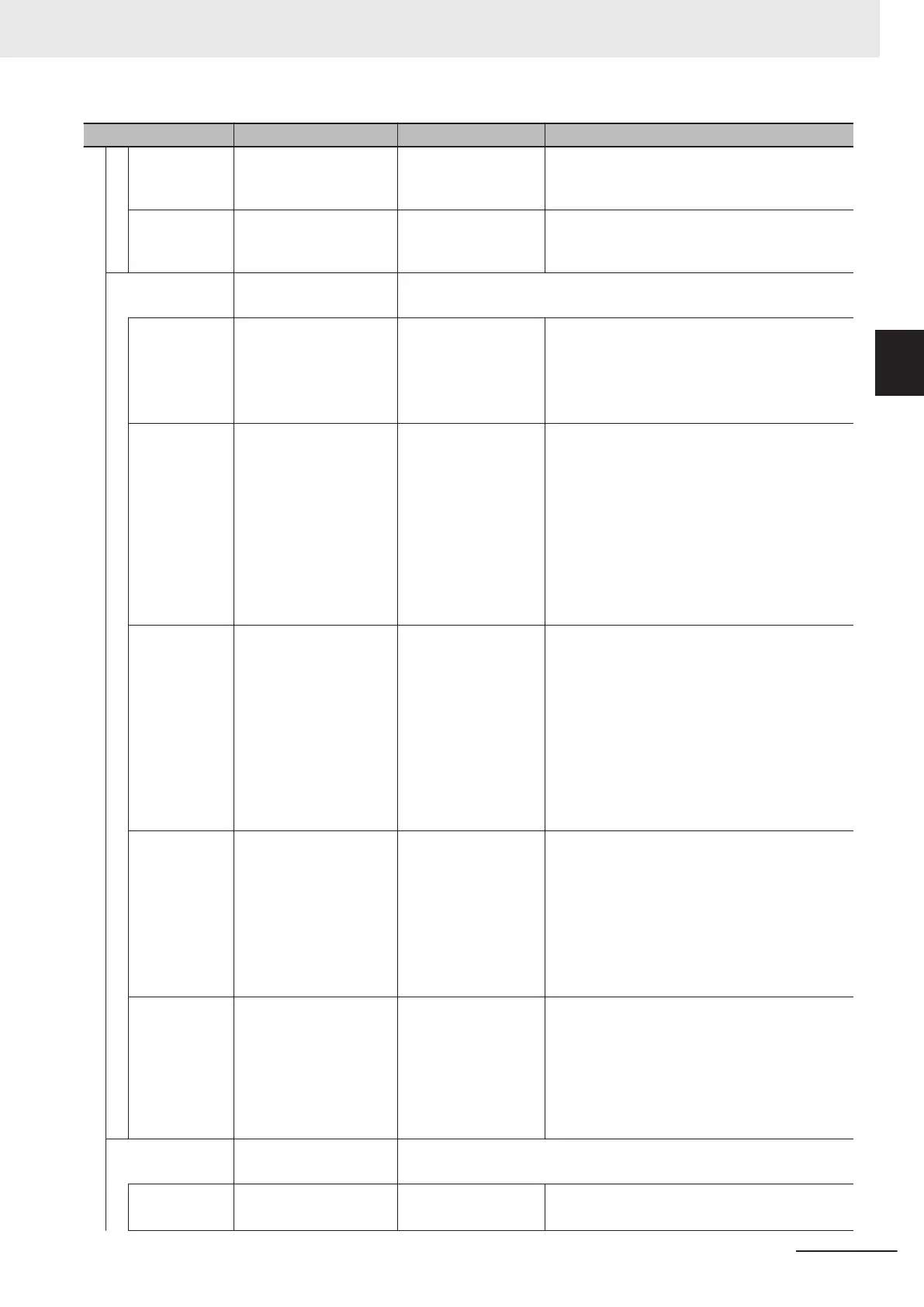
Name Data type Meaning Function
CSV BOOL Cyclic Synchronous
V
elocity (CSV) Con-
trol Mode
TRUE when the Servo is ON at the Servo Drive
and the current mode is CSV Mode.
*9
CST BOOL Cyclic Synchronous
T
orque (CST) Control
Mode
TRUE when the Servo is ON at the Servo Drive
and the current mode is CST Mode.
*9
Cmd _sAXIS_REF_CMD_
DA
TA
Axis Command Value
Pos LREAL Command Current
Position
Contains the current value of the command po-
sition. (Unit: command units)
When the Servo is OFF and the mode is not
position control mode, this variable contains the
actual current position.
*10
Vel LREAL Command Current
V
elocity
Contains the current value of the command ve-
locity. (Unit: command units/s)
A plus sign is added when traveling in the posi-
tive direction, and a minus sign when traveling
in the negative direction.
The velocity is calculated from the difference
with the command current position. When the
Servo is OFF and the mode is not the position
control mode, the velocity is calculated based
on the actual current position.
AccDec LREAL Command Current
Acceleration/Deceler-
ation
Contains the current value of the command ac-
celeration/deceleration rate. (Unit: command
units/s
2
)
The acceleration/deceleration rate is calculated
from the dif
ference with the command current
velocity. A plus sign is added for acceleration,
and a minus sign is added for deceleration.
Zero when the command acceleration/deceler-
ation rate of the instruction under execution is
0.
Jerk LREAL Command Current
Jerk
Contains the current value of the command
jerk. (Unit: command units/s
3
)
A plus sign is added when the absolute value of
acceleration/deceleration is increasing, and a
minus sign is added when it is decreasing.
Zero when the command acceleration/deceler-
ation rate and command jerk of the instruction
under execution is 0.
Trq LREAL Command Current
T
orque
Contains the current value of the command tor-
que. (Unit: %)
A plus sign is added when traveling in the posi-
tive direction, and a minus sign when traveling
in the negative direction.
Contains the same value as the actual current
torque except in torque control mode.
Act _sAXIS_REF_ACT_
DA
TA
Axis Current Value
Pos LREAL Actual Current Posi-
tion
Contains the actual current position. (Unit: com-
mand units)
*10
2 Variables and Instructions
2-7
NY-series Motion Control Instructions Reference Manual (W561)
2-1 Variables
2
2-1-2 Axis Variables