Fa0 = F
×
L
La0
Fa1 = F
L
La1
Fa2 = F
L
La2
Fa3 = F
L
La3
L = La0
2
+ La1
2
+ La2
2
+ La3
2
×
×
×
Velocity (Target Velocity)
•
An interpolation velocity specification error will occur if Velocity (Target Velocity) is set to 0. All axes
will stop if an axis in the specified axes group is in operation.
• If any of the calculated target velocities Fa0 to Fa3 for Velocity (Target Velocity) exceed the maxi-
mum velocity, the Velocity (Target Velocity) will be automatically adjusted so that one of the axes
operates at the maximum velocity.
Jerk
The relationships between Acceleration (Acceleration Rate), Deceleration (Deceleration Rate), and
Velocity (Target Velocity) when Jerk is set to 0 and when it is set to any other value are shown below.
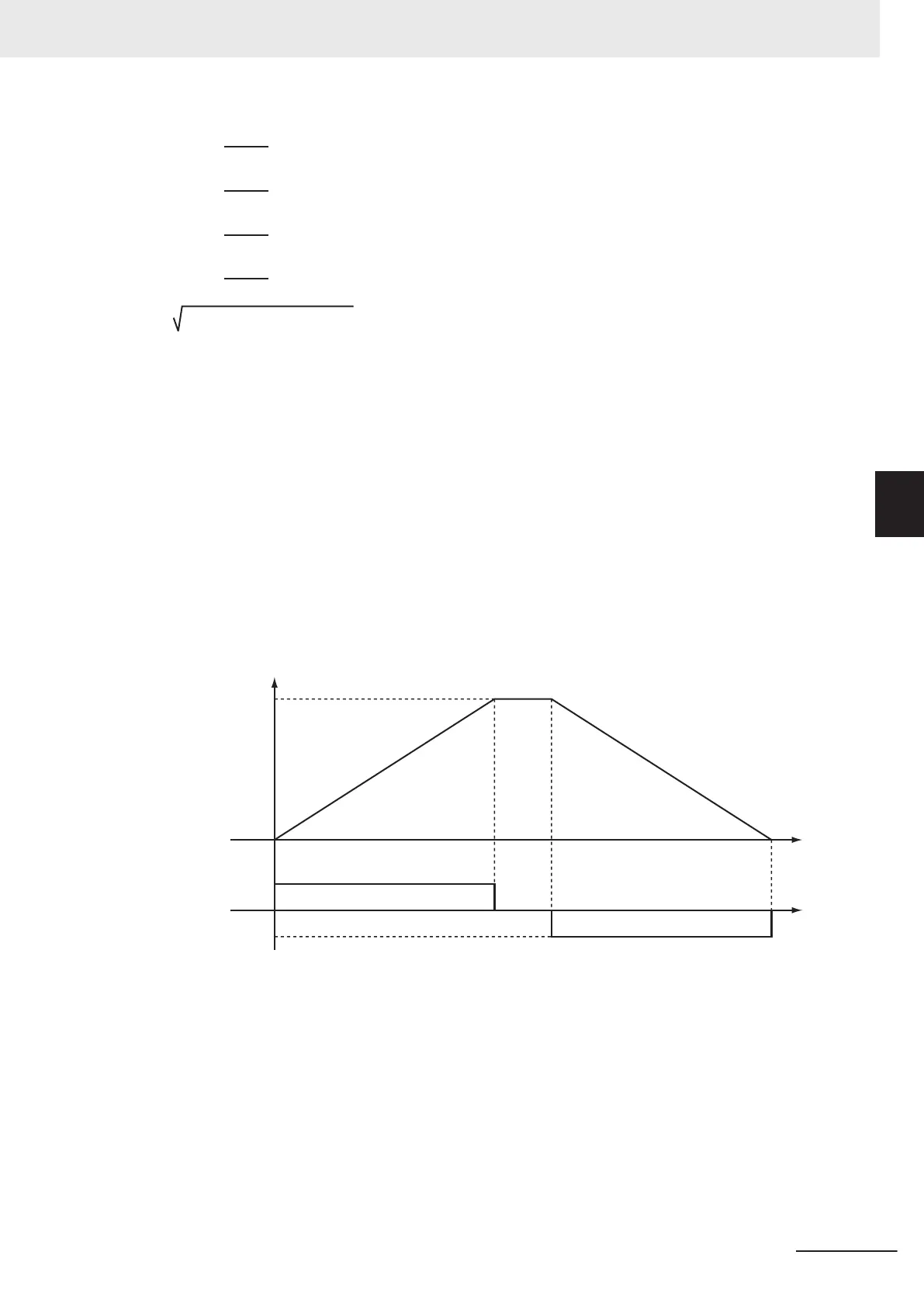
• Jerk Set to 0
The command value for the velocity is created with acceleration rate At and deceleration rate Dt.
At
Time
Time
Decelerati
on rate
Acceleration rate
Interpolation velocity
Vt
-Dt
Vt: Specified interpolation velocity, At: Specified acceleration rate, Dt: Specified deceleration rate.
•
Short Travel Distance When Jerk Is 0
The interpolation velocity will not reach the specified Vt (Target Velocity).
4 Axes Group Instructions
4-17
NY-series Motion Control Instructions Reference Manual (W561)
MC_MoveLinear
4
Function