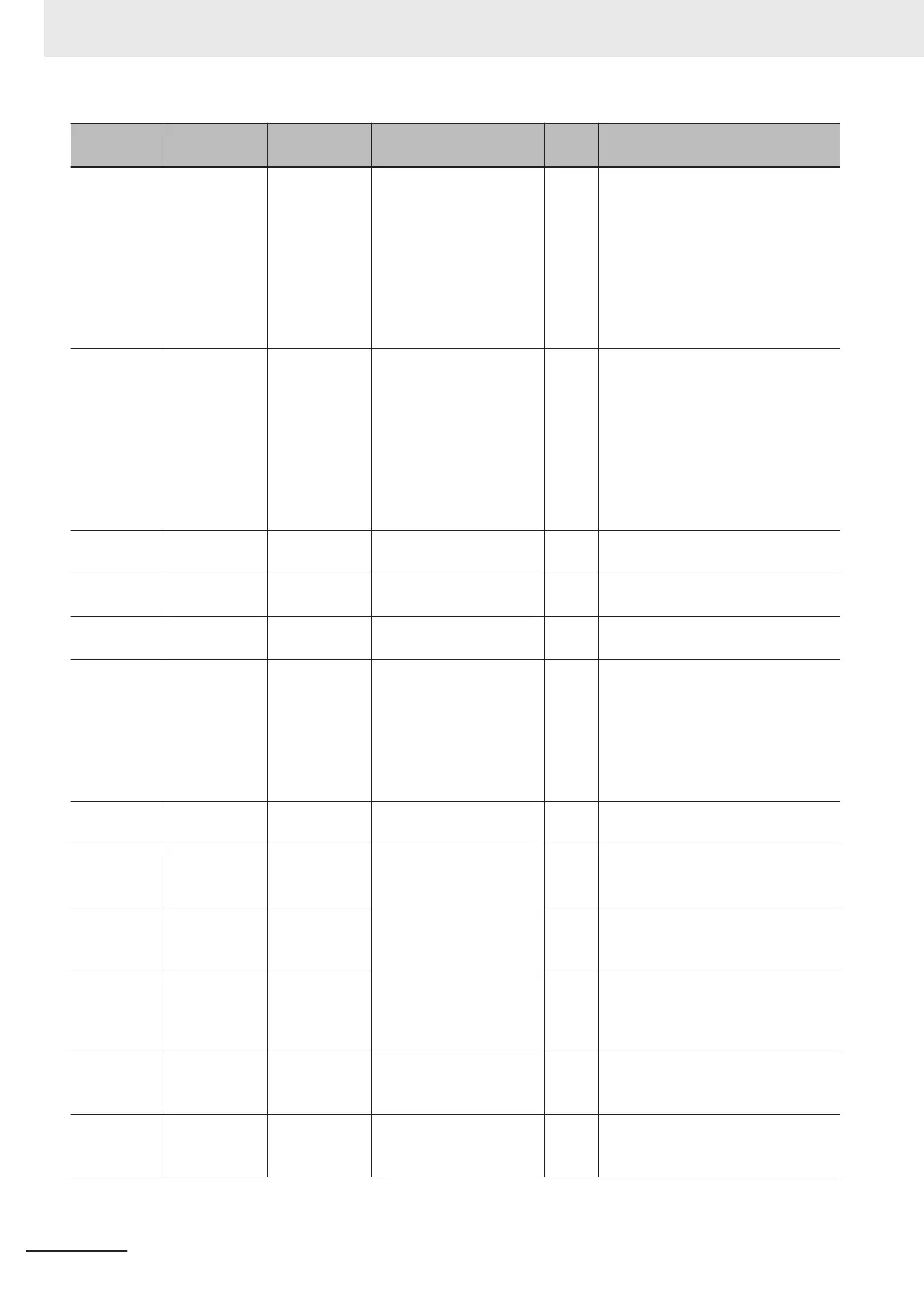
Name Meaning Data type Valid range
De-
fault
Description
PositiveVal-
ue
Positive Tor-
que Limit
LREAL 0.1 to 1000.0 or 0.0 300.0 Specifies the torque limit in the posi-
tive direction in increments of 0.1%.
If a value that exceeds the
Maximum Positive T
orque Limit
axis parameter, the positive torque
will be the Maximum Positive
Torque Limit.
The value will be 0 if 0 or a negative
value is specified.
NegativeVal-
ue
Negative Tor-
que Limit
LREAL 0.1 to 1000.0 or 0.0 300.0 Specifies the torque limit in the neg-
ative direction in increments of 0.1%.
If a value that exceeds the
Maximum Negative T
orque Limit
axis parameter, the negative torque
will be the Maximum Negative
Torque Limit.
The value will be 0 if 0 or a negative
value is specified.
WindowOnly Window Only BOOL TRUE or FALSE FALS
E
Specify whether to enable or disable
the window mask.
FirstPosition First Position LREAL Negative number, posi-
tive number
, or 0
0 Specify the first position.
LastPosition Last Position LREAL Negative number, posi-
tive number
, or 0
0 Specify the last position.
StopMode Stopping
Mode Selec-
tion
_eMC_STOP
_MODE
1: _mcImmediateStop
2: _mcImmediateStop-
FEReset
3: _mcFreeRunStop
4: _mcNonStop
4
*1
Specifies the stopping method.
1: Perform an immediate stop
2: Perform an immediate stop and
reset the following error counter
3: Perform an immediate stop and
turn OFF the Servo
4: Do not stop
Relative
(Reserved)
Relative Posi-
tion Selection
BOOL TRUE or FALSE FALS
E
(Reserved)
Execution-
Mode
(Reserved)
Execution
Mode
_eMC_EXE-
CU-
TION_MODE
0: _mcImmediately
0
*1
(Reserved)
Permitted-
Deviation
Permitted Fol-
lowing Error
LREAL Non-negative number 0 Specifies the permitted maximum
value for the following error between
the master and slave axes.
CmdPos-
Mode
Command
Current Posi-
tion Count Se-
lection
_eMC_CMDP
OS_MODE
0: _mcCount
0
*1
0: Use the actual current position
and update the command current
position.
Home remains defined.
CoordSys-
tem
Coordinate
System
_eMC_CO-
ORD_SYS-
TEM
0: _mcACS
0
*1
Specifies the coordinate system.
0: Axis coordinate system (ACS)
Transition-
Mode
Transition
Mode
_eMC_TRAN-
SI-
TION_MODE
0: _mcTMNone
10: _mcTMCornerSuper-
imposed
0
*1
Specifies the path of motion.
0: T
ransition disabled
10: Superimpose corners
2 Variables and Instructions
2-18
NY-series Motion Control Instructions Reference Manual (W561)