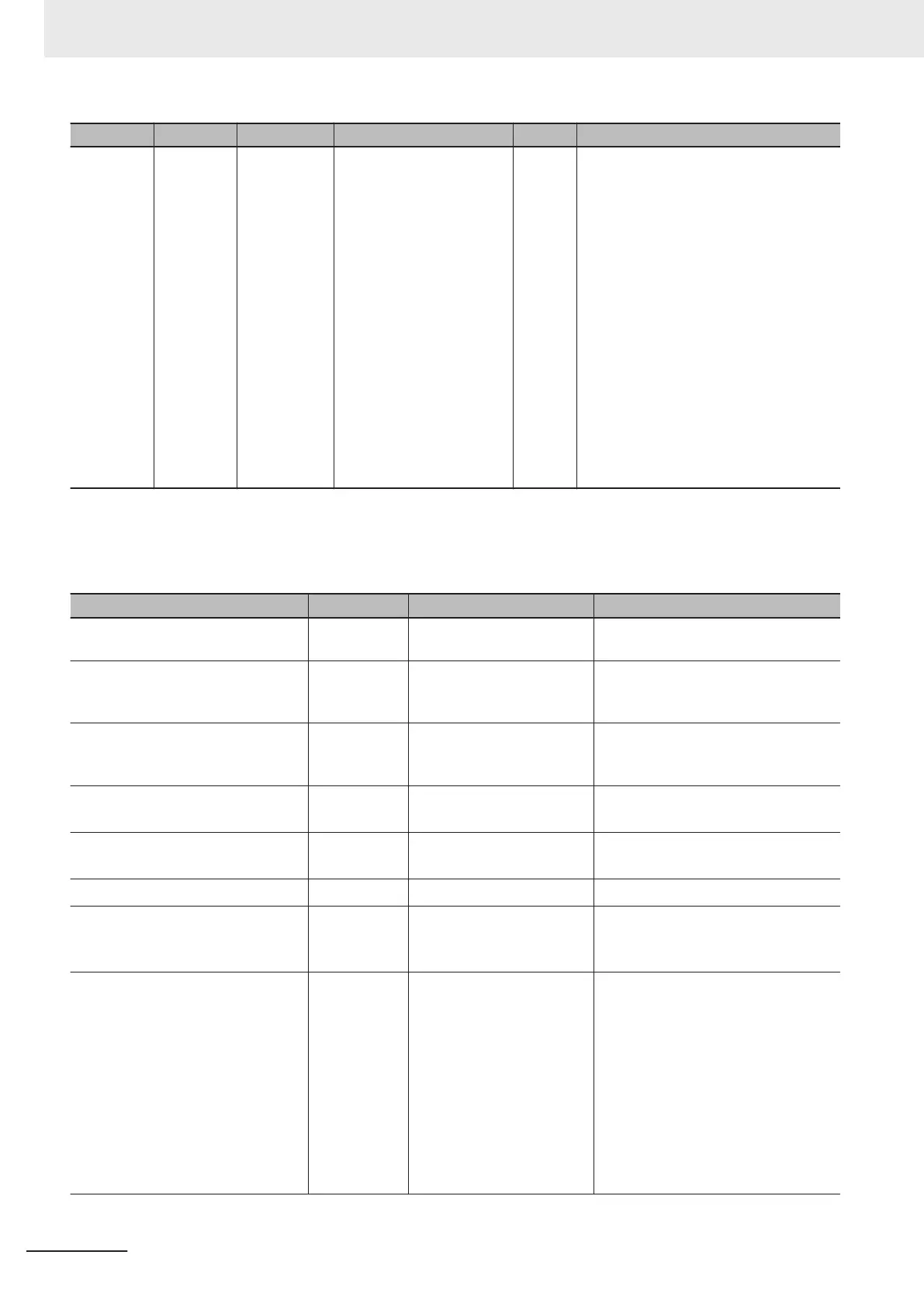
Name Meaning Data type Valid range Default Description
Parameter-
Number
Parameter
Number
_eMC_PA-
RAME-
TER_NUM-
BER
0: _mcChkVel
1: _mcChkAcc
2: _mcChkDec
3: _mcPosiChkT
rq
*1
4: _mcNegaChkTrq
*1
5: _mcFELmt
6: _mcChkFELmt
7: _mcSwLmtMode
8: _mcPosiSwLmt
9: _mcNegaSwLmt
10: _mcInPosTime
11: _mcInPosRange
12: _mcStartVel
0
*2
Specify the parameter to write.
0: Velocity Warning Value/Interpolation
Velocity Warning Value
1: Acceleration Warning Value/Interpola-
tion Acceleration Warning Value
2: Deceleration Warning Value/Interpo-
lation Deceleration Warning Value
3: Positive Torque Warning Value
4: Negative Torque Warning Value
5: Following Error Over Value
6: Following Error Warning Value
7: Software Limits
8: Positive Software Limit
9: Negative Software Limit
10: In-position Check Time
11: In-position Range
12: Start Velocity
*1. This parameter is enabled only for torque control.
*2. The default value for an enumeration variable is actually not the number, but the enumerator.
Parameter Number Data Types and Valid Ranges
Parameter Data type Valid range Comments
0 Velocity Warning Value/Interpo-
lation V
elocity Warning Value
UINT 0 to 100 The unit is %.
1 Acceleration Warning Value/
Interpolation Acceleration
W
arning Value
UINT 0 to 100 The unit is %.
2 Deceleration Warning Value/
Interpolation Deceleration
W
arning Value
UINT 0 to 100 The unit is %.
3 Positive Torque Warning Value
*1
UINT 0 to 1000 The unit is %.
4 Negative Torque Warning Val-
ue
*1
UINT 0 to 1000 The unit is %.
5 Following Error Over Value LREAL Positive number
The unit is command units.
*2
6 Following Error Warning Value LREAL Positive number Set a value that is less than the value
of the Following Error Over V
alue.
The unit is command units.
*2
7 Software Limits _eMC_SWL
MT_MODE
0: _mcNonSwLmt
1: _mcCmdDeceleration-
Stop
2: _mcCmdImmediateStop
3: _mcActDecelerationStop
4: _mcActImmediateStop
0: Disabled
1: Deceleration stopping enabled for
command position
2: Immediate stopping enabled for
command position (stop using re-
maining pulses)
3: Deceleration stopping enabled for
actual position
4: Immediate stopping enabled for
actual position (stop using remaining
pulses)
5 Common Command Instructions
5-14
NY-series Motion Control Instructions Reference Manual (W561)