Valid Range of Input Variables
This section gives the valid ranges of input variables to motion control instructions. Refer to individual
instruction descriptions for the valid ranges for each instruction.
BOOL Input Variables
Any value other than FALSE is treated as TRUE. For this reason, out-of-range errors do not occur.
Enumerated (ENUM) Input Variables
Values that are outside of the valid range will result in an error.
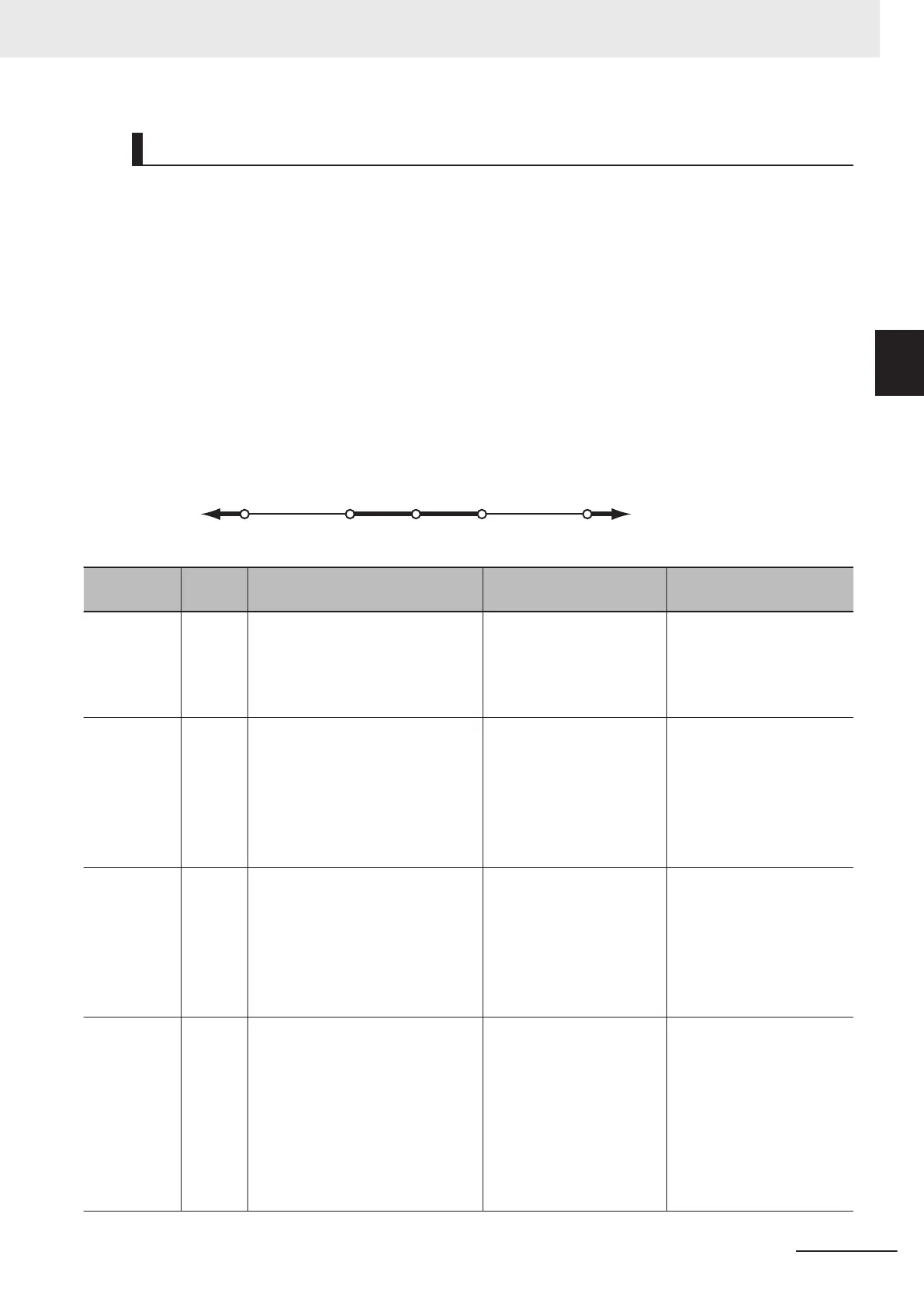
Input Variables Given as Full Range, Positive Number, or Negative Number
Operation when an input variable is set inside or outside the valid range is described in the follow-
ing table.
Outsid
e the maximum
value range
Outside the minimum
value range (excluding 0)
Outside the maximum
value range
−
0
+
Name
Mean-
ing
Valid range
Outside the maximum
value range
Outside the minimum val-
ue range (excluding 0)
Velocity Velocity 0, (-1 ≤ and ≤ -Maximum V
elocity),
or (1 ≤ and ≤ Maximum Velocity)
*1
Set to the Maximum
Velocity for a positive
number, and to the -
Maximum Velocity for a
negative number.
*2
Set to 1 pulse/s when posi-
tive number, and -1 pulse/s
when negative number.
*2
Acceleration Acceler-
ation
Rate
0 or (0.004 ≤ and ≤ Maximum
Acceleration)
*3
Set to the Maximum
Acceleration.
If the Acceleration time
*4
is less than 125
μs, it will
always be 125 μs.
Set to 0.004 pulses/s
2
when
positive number
.
If the Acceleration time
*4
is greater than 250 s, it will
always be 250 s.
Error when negative num-
ber.
Deceleration Deceler-
ation
Rate
0 or (0.004 ≤ and ≤ Maximum
Deceleration)
*5
Set to the Maximum
Deceleration.
If the Deceleration time
*4
is less than 125
μs, it will
always be 125 μs.
Set to 0.004 pulses/s
2
when
positive number
.
If the Deceleration time
*4
is greater than 250 s, it will
always be 250 s.
Error when negative num-
ber.
Jerk Jerk 0 or (0.000016 ≤ and
25,600,000,000,000,000 pulses/s
3
)
Set to
25,600,000,000,000,000
pulses/s
3
.
If the Acceleration jerk
application time
*6
or the
Deceleration jerk
application time
*6
is less
than 125
μs, it will always
be 125 μs.
Set to 0.000016 pulses/s
3
.
If the Acceleration jerk
application time
*6
or the
Deceleration jerk
application time
*6
is great-
er than 250 s, it will always
be 250 s.
Error when negative num-
ber
.
2 Variables and Instructions
2-21
NY-series Motion Control Instructions Reference Manual (W561)
2-1 Variables
2
2-1-4 Input Variables for Motion Control Instructions