*7. Position must be an absolute value in pulses and must be no more than 40 bits signed.
*8. The unit is %.
*9. The upper limit of the Maximum Interpolation V
elocity in the axis parameters is the twice as high as the upper limit of
the Maximum Velocity in the axis parameters.
*10.
The upper limit of the Maximum Interpolation Acceleration in the axis parameters is 6,400,000,000,000 pulses/s
2
.
*11. Calculated as follows: Interpolation acceleration time = Interpolation velocity/Interpolation acceleration rate, Interpola-
tion deceleration time = Interpolation velocity/Interpolation deceleration rate, and Acceleration/deceleration time = Ac-
celeration time + Deceleration time.
*12.
The upper limit of the Maximum Interpolation Deceleration in the axis parameters is 6,400,000,000,000 pulses/s
2
.
*13. The interpolation acceleration jerk application time and the interpolation deceleration jerk application time are the times
that interpolation jerk is applied.
Calculated as follows: Interpolation acceleration jerk application time = Interpolation acceleration rate/Interpolation jerk
and Interpolation deceleration jerk application time = Interpolation deceleration rate/Interpolation jerk.
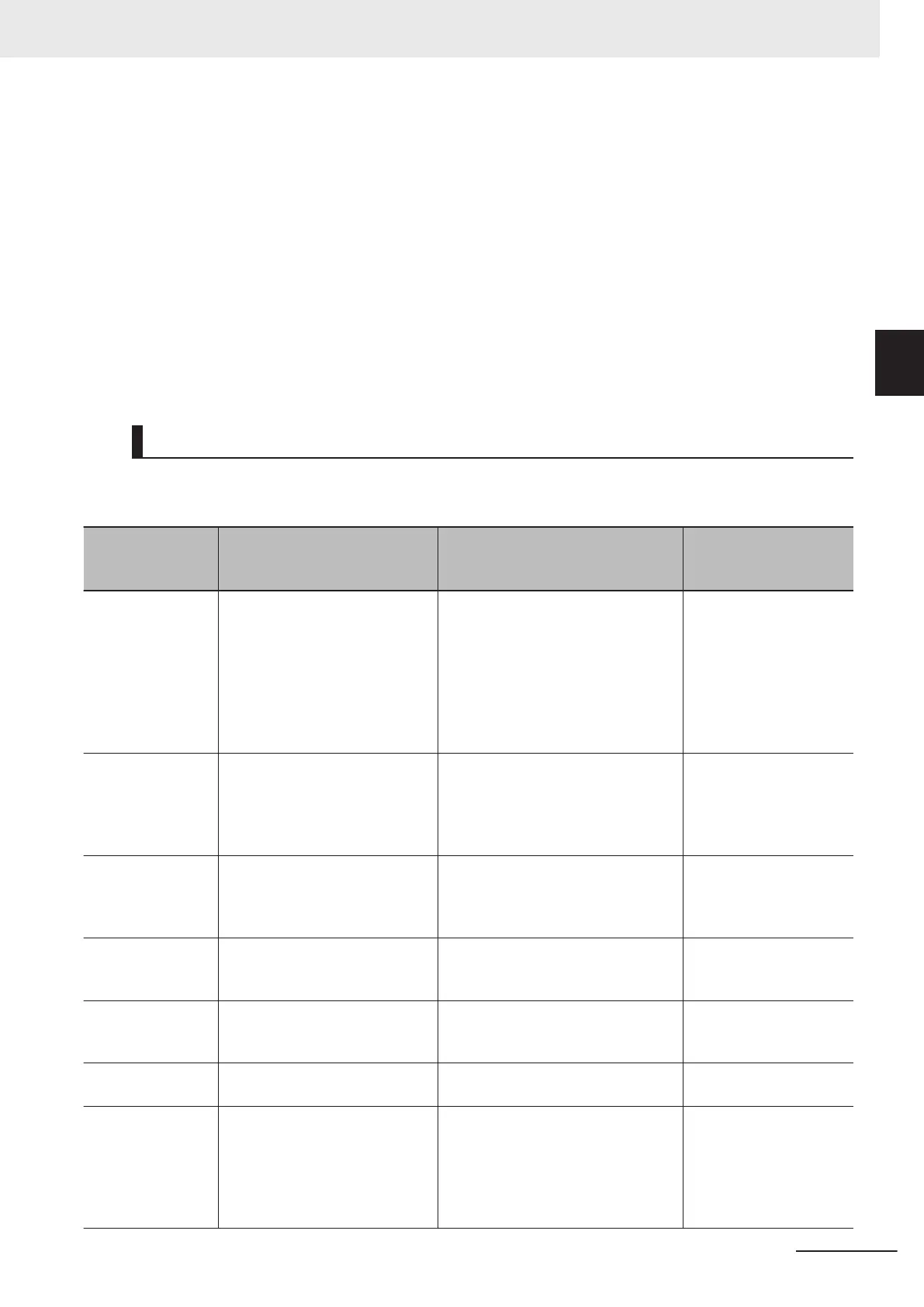
Enumerations
This ENUM data is used by input variables to motion control instructions.
An enumeration input variable is not actually set to the number, but to the enumerator.
Data type Valid range Description
Corresponding instruc-
tion variable
(Meaning)
_eMC_BUF-
FER_MODE
0: _mcAborting
1: _mcBuf
fered
2: _mcBlendingLow
3: _mcBlendingPrevious
4: _mcBlendingNext
5: _mcBlendingHigh
Specifies the operation for multi-exe-
cution of motion control instructions.
0: Aborting
1: Buffered
2: Blending low
3: Blending previous
4: Blending next
5: Blending high
BufferMode
(Buffer Mode Selection)
_eMC_CIRC_MOD
E
0: _mcBorder
1: _mcCenter
2: _mcRadius
Specifies the method for circular in-
terpolation.
0: Border point
1: Center
2: Radius
CircMode
(Circular Interpolation
Mode)
_eMC_CAM_TRAN
SITION
0: _mcCTNone Specifies the slave axis command
value output method when the cam is
restarted.
0: No limit or correction
CamTransition
(Cam T
ransition Selec-
tion)
_eMC_CIRC_PAT
HCHOICE
0: _mcCW
1: _mcCCW
Specifies the path direction.
0: CW
1: CCW
PathChoice
(Path Choice)
_eMC_COM-
BINE_MODE
0: _mcAddAxes
1: _mcSubAxes
Specifies the combining method.
0: Addition
1: Subtraction
CombineMode
(Combine Mode)
_eMC_CO-
ORD_SYSTEM
0: _mcACS Specifies the coordinate system.
0: Axis coordinate system (ACS)
CoordSystem
(Coordinate System)
_eMC_DIRECTION 0: _mcPositiveDirection
1: _mcShortestW
ay
2: _mcNegativeDirection
3: _mcCurrentDirection
4: _mcNoDirection
Specifies the direction of motion.
0: Positive direction
1: Shortest way
2: Negative direction
3: Current direction
4: No direction specified
Direction
2 Variables and Instructions
2-23
NY-series Motion Control Instructions Reference Manual (W561)
2-1 Variables
2
2-1-4 Input Variables for Motion Control Instructions