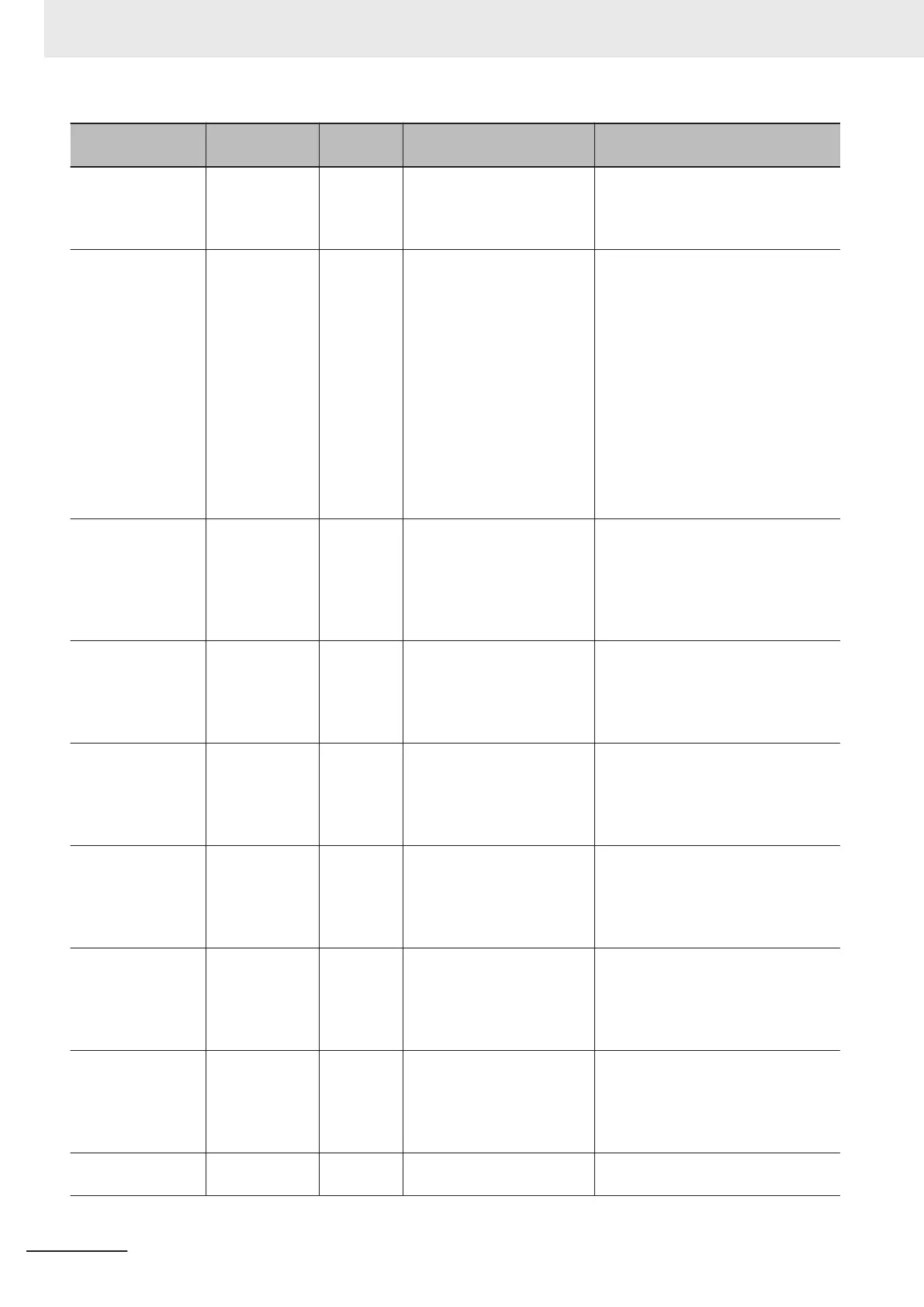
Member
Parameter
name
Data type Valid range Description
MaxDec Maximum De-
celeration
LREAL Non-negative long reals Set the maximum deceleration rate
for an axis operation command.
There will be no limit to the decelera-
tion rate if 0 is set.
AccDecOver Acceleration/
Deceleration
Over
_eMC_AC-
CDECOV
-
ER
0: _mcAccDecOverBuffer
1: _mcAccDecOverRapid
2: _mcAccDecOverError-
Stop
Set the operation for when the maxi-
mum acceleration/deceleration rate
would be exceeded after excessive
acceleration/deceleration during ac-
celeration/deceleration control of the
axis because stopping at the target
position is given priority.
0: Use rapid acceleration/decelera-
tion. (Blending is changed to Buf-
fered.)
*1
1: Use rapid acceleration/decelera-
tion.
2: Minor fault stop
*2
ReverseMode Operation Se-
lection at Re-
versing
_eMC_RE-
VERSE_M
ODE
0: _mcReverseModeDece-
lerationStop
1: _mcReverseModeImme-
diateStop
Specify the operation for reversing
rotation for multi-execution of instruc-
tions, re-execution of instructions,
and interrupt feeding.
0: Deceleration stop
1: Immediate stop
VelWarningVal Velocity Warn-
ing V
alue
UINT 0 or 1 to 100 Set the percentage of the maximum
velocity at which to output a velocity
warning for the axis.
No velocity warning is output if 0 is
set.
AccWarningVal Acceleration
W
arning Value
UINT 0 or 1 to 100 Set the percentage of the maximum
acceleration rate at which to output
an acceleration warning for the axis.
No acceleration warning is output if 0
is set.
DecWarningVal Deceleration
W
arning Value
UINT 0 or 1 to 100 Set the percentage of the maximum
deceleration rate at which to output a
deceleration warning for the axis.
No deceleration warning is output if 0
is set.
PosiTrqWarningVal
*3
Positive Torque
W
arning Value
UINT 0 or 1 to 1,000 Set the torque command value at
which to output a positive torque
warning.
No positive torque warning is output if
0 is set.
NegaTrqWarningV-
al
*3
Negative Tor-
que W
arning
Value
UINT 0 or 1 to 1,000 Set the torque command value at
which to output a negative torque
warning.
No negative torque warning is output
if 0 is set.
InPosRange In-position
Range
LREAL Non-negative long reals Set the in-position width.
5 Common Command Instructions
5-52
NY-series Motion Control Instructions Reference Manual (W561)