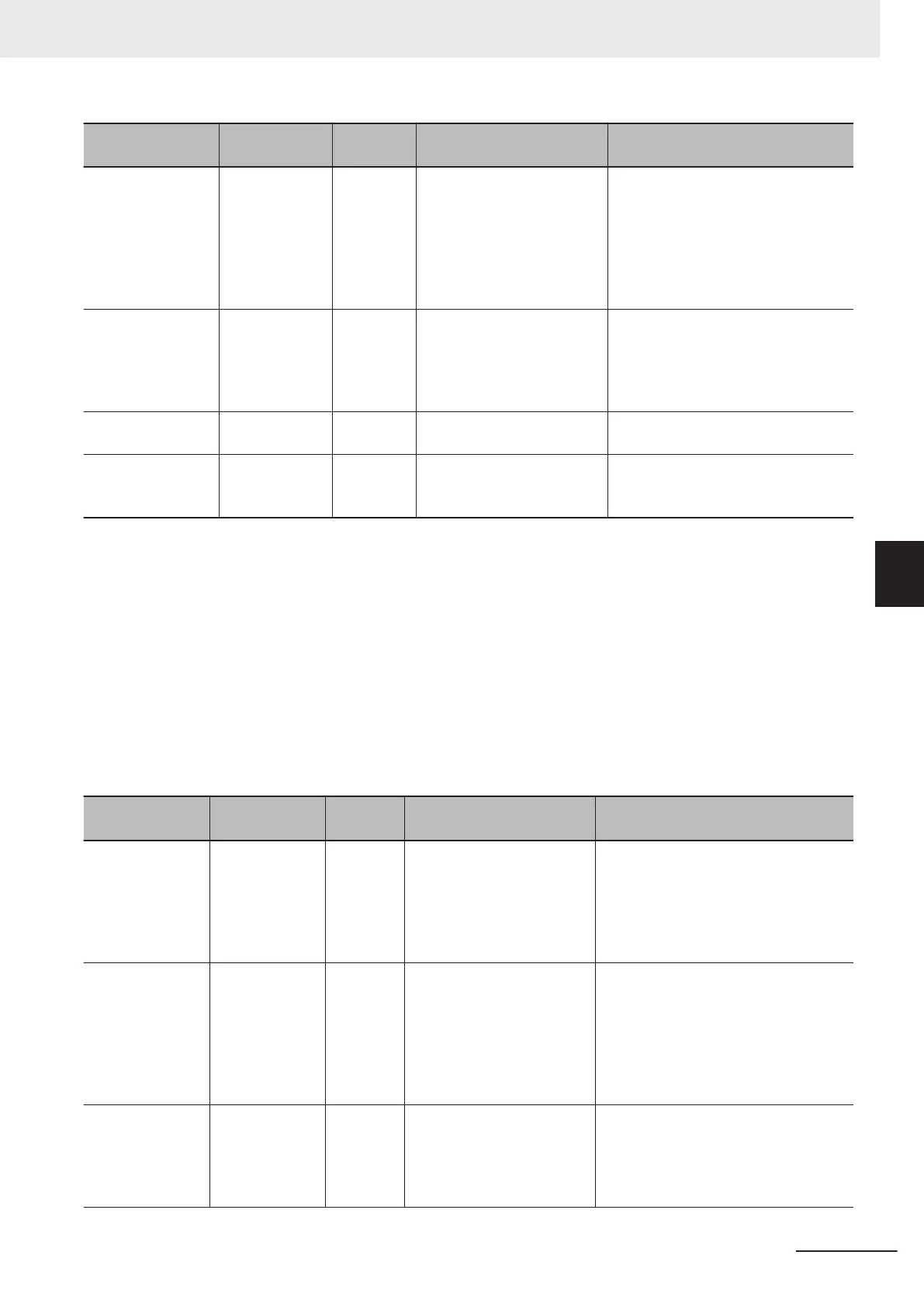
Member
Parameter
name
Data type Valid range Description
InPosCheckTime In-position
Check T
ime
UINT 0 or 1 to 10,000 Set the in-position check time in milli-
seconds.
Set 0 to check for the end of position-
ing only when you define the home
position during homing. No check is
made for the end of positioning at
other times.
ActVelFilterTime-
Constant
Actual Velocity
Filter T
ime Con-
stant
UINT 0 or 1 to 100 Set the time period to calculate the
average travel of the actual velocity
in milliseconds.
The average travel is not calculated if
0 is set.
ZeroPosRange Zero Position
Range
LREAL Non-negative long reals Set the home position detection
width.
(Reserved) (Reserved
area)
AR-
RA
Y[0..31]
OF BYTE
--- ---
*1. Blending is not changed to Buffered.
For details, refer to the NY
-series Industrial Panel PC / Industrial Box PC Motion Control User’s Manual (Cat. No.
W559).
*2. The axis does not stop with an error and operation continues if blending operation is used.
For details, refer to the NY
-series Industrial Panel PC / Industrial Box PC Motion Control User’s Manual (Cat. No.
W559).
*3. This parameter is enabled only for torque control.
_sAXIS_OTHER_OPERATION_SETTINGS (Other Operation Settings)
The _sAXIS_OTHER_OPERATION_SETTINGS structure data type is used to specify the values of
other axis parameter operation settings.
Each member is described in the following table.
Member
Parameter
name
Data type Valid range Description
ImmediateStopIn-
putStopMode
Immediate Stop
Input Stop
Method
_eMC_ST
OP_MOD
E
1: _mcImmediateStop
2: _mcImmediateStopFERe-
set
3: _mcFreeRunStop
Set the stopping method in the MC
Function Module when the immediate
stop input is enabled.
1: Immediate stop
2: Immediate stop and error reset
3: Immediate stop and Servo OFF
LimitInputStop-
Mode
Limit Input Stop
Method
_eMC_ST
OP_MOD
E
0: _mcDeccelerationStop
1: _mcImmediateStop
2: _mcImmediateStopFERe-
set
3: _mcFreeRunStop
Set the stopping method in the MC
Function Module when the positive limit
input or negative limit input is enabled.
0: Deceleration stop
1: Immediate stop
2: Immediate stop and error reset
3: Immediate stop and Servo OFF
DriveErrorReset-
MonitoringT
ime
Drive Error Re-
set Monitoring
Time
UINT 1 to 1,000 Set the monitor time for a drive error re-
set. (Unit: ms)
After the monitor time has elapsed, re-
set processing will end even if the drive
error is not yet reset.
5 Common Command Instructions
5-53
NY-series Motion Control Instructions Reference Manual (W561)
MC_WriteAxisParameter
5
Function