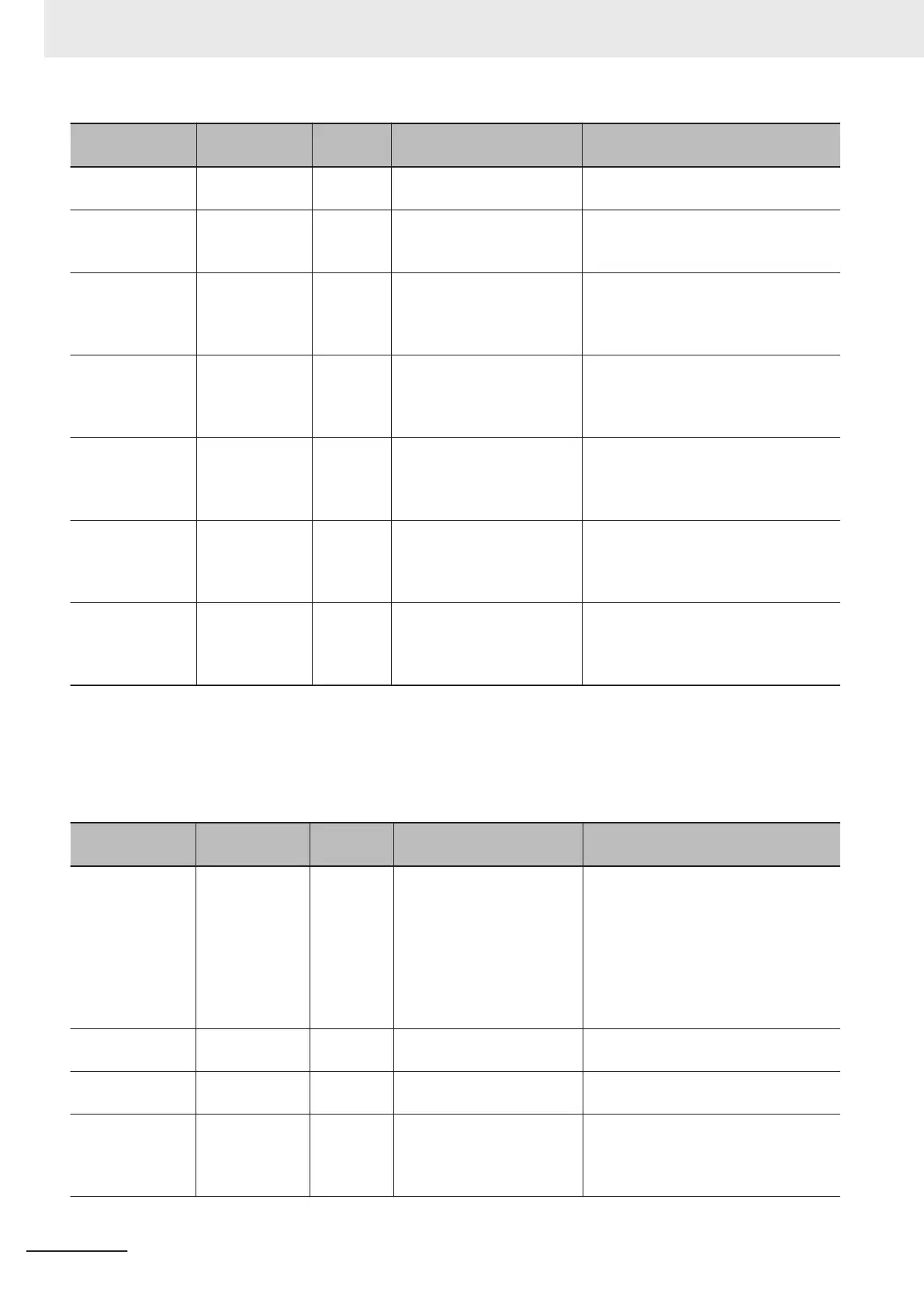
Member
Parameter
name
Data type Valid range Description
MaxPosiTrqLimit Maximum Posi-
tive T
orque Limit
LREAL 0.0 to 1,000.0 Set the maximum value of the positive
torque limit.
MaxNegaTrqLimit Maximum Neg-
ative T
orque
Limit
LREAL 0.0 to 1,000.0 Set the maximum value of the negative
torque limit.
ImmediateStopIn-
putLogicInversion
Immediate Stop
Input Logic In-
version
BOOL TRUE or FALSE Set whether to reverse the logic of the
immediate stop input signal.
TRUE: Reverse turn.
F
ALSE: No reverse turn.
PosiLimitInputLo-
gicInversion
Positive Limit
Input Logic In-
version
BOOL TRUE or FALSE Set whether to reverse the logic of the
positive limit input signal.
TRUE: Reverse turn.
F
ALSE: No reverse turn.
NegaLimitInput-
LogicInversion
Negative Limit
Input Logic In-
version
BOOL TRUE or FALSE Set whether to reverse the logic of the
negative limit input signal.
TRUE: Reverse turn.
F
ALSE: No reverse turn.
HomeProximityIn-
putLogicInversion
Home Proximity
Input Logic In-
version
BOOL TRUE or FALSE Set whether to reverse the logic of the
home proximity input signal.
TRUE: Reverse turn.
F
ALSE: No reverse turn.
(Reserved) (Reserved area) AR-
RA
Y[0..31
] OF
BYTE
--- ---
_sAXIS_LIMIT_SETTINGS (Limit Settings)
The _sAXIS_LIMIT_SETTINGS structure data type is used to specify the values of the limit settings in
the axis parameters.
Each member is described in the following table.
Member
Parameter
name
Data type Valid range Description
SwLimitMode Software Limits _eMC_SW
LMT_MOD
E
0: _mcNonSwLmt
1: _mcCmdDeceleration-
Stop
2: _mcCmdImmediateStop
3: _mcActDecelerationStop
4: _mcActImmediateStop
Select the software limit function.
0: Disabled
1: Deceleration stop for command posi-
tion
2: Immediate stop for command posi-
tion
3: Deceleration stop for actual position
4: Immediate stop for actual position
PosiSwLimit Positive Soft-
ware Limit
LREAL Long reals Set the software limit in the positive di-
rection.
NegaSwLimit Negative Soft-
ware Limit
LREAL Long reals Set the software limit in the negative di-
rection.
FollowingErrorO-
verV
al
Following Error
Over Value
LREAL Non-negative long reals Set the excessive following error check
value.
Set 0 to disable the excessive following
error check.
5 Common Command Instructions
5-54
NY-series Motion Control Instructions Reference Manual (W561)