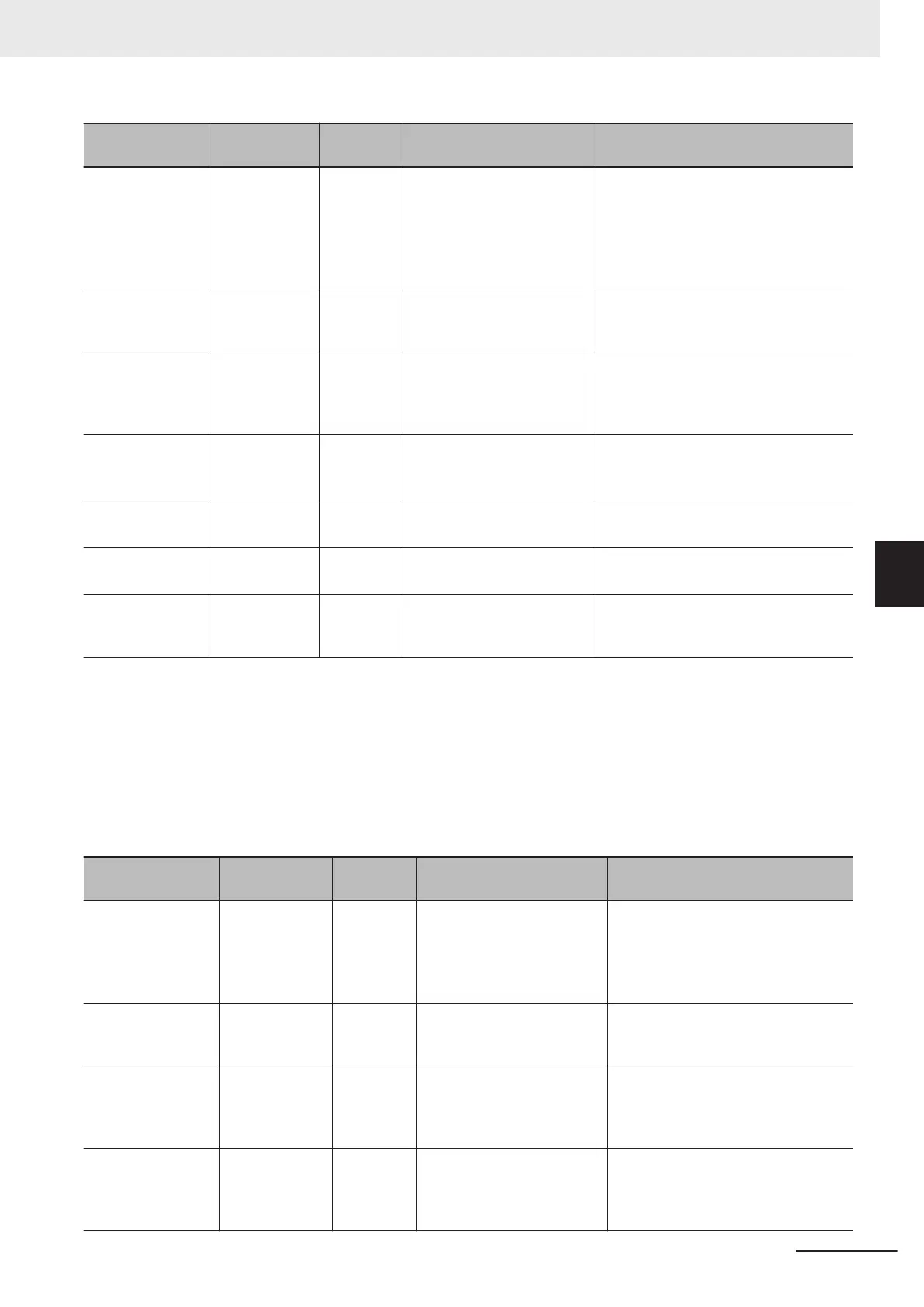
Member
Parameter
name
Data type Valid range Description
CmdPlsCountPer-
MotorRotation
Command
Pulse Count
Per Motor Ro-
tation
UDINT 1 to 4,294,967,295 Set the number of pulses per motor ro-
tation for command positions according
to the encoder resolution.
The command value is converted to the
equivalent number of pulses based on
the electronic gear ratio.
WorkTravelDis-
tancePerMotor-
Rotation
Work Travel
Distance Per
Motor Rotation
LREAL 0.000000001 to
4,294,967,295
Set the workpiece travel distance per
motor rotation for command positions.
ReducerUse Reducer Use BOOL TRUE or FALSE Specify whether to use the reducer set-
ting or not.
TRUE: Use.
F
ALSE: Do not use.
WorkTravelDis-
tancePerW
orkSi-
deRotation
*1
*2
Work Travel
Distance Per
Rotation
LREAL Positive long reals Set the work travel distance per rota-
tion.
WorkSideGear-
Ratio
*1
Work Gear Ra-
tio
UDINT 1 to 4,294,967,295 Set the gear ratio for the workpiece.
MotorSideGear-
Ratio
*1
Motor Gear
Ratio
UDINT 1 to 4,294,967,295 Set the gear ratio of the motor.
(Reserved) (Reserved
area)
ARRAY
[0..7] OF
BYTE
--- ---
*1. This parameter is enabled when you set Reducer Use to TRUE.
*2. The setting is possible only when the Count Mode is Linear Mode. When the Count Mode is Rotary Mode, the param-
eter value is calculated from the modulo maximum position setting value and modulo minimum position setting value.
_sAXIS_OPERATION_SETTINGS (Operation Settings)
The _sAXIS_OPERATION_SETTINGS structure data type is used to specify the values of axis param-
eter operation settings.
Each member is described in the following table.
Member
Parameter
name
Data type Valid range Description
MaxVel Maximum Ve-
locity
LREAL Positive long reals Set the maximum velocity for each
axis.
Do not set a value that exceeds the
maximum speed of the motor that
you are using.
StartVel Start Velocity LREAL 0.0 to Upper limit of positive
long reals
Set the start velocity for the axis.
Set a value that does not exceed the
maximum velocity
.
MaxJogVel Maximum Jog
V
elocity
LREAL Positive long reals Set the maximum jog velocity for the
axis.
Set a value that does not exceed the
maximum velocity.
MaxAcc Maximum Ac-
celeration
LREAL Non-negative long reals Set the maximum acceleration rate
for an axis operation command.
There will be no limit to the accelera-
tion rate if 0 is set.
5 Common Command Instructions
5-51
NY-series Motion Control Instructions Reference Manual (W561)
MC_WriteAxisParameter
5
Function

 Loading...
Loading...




