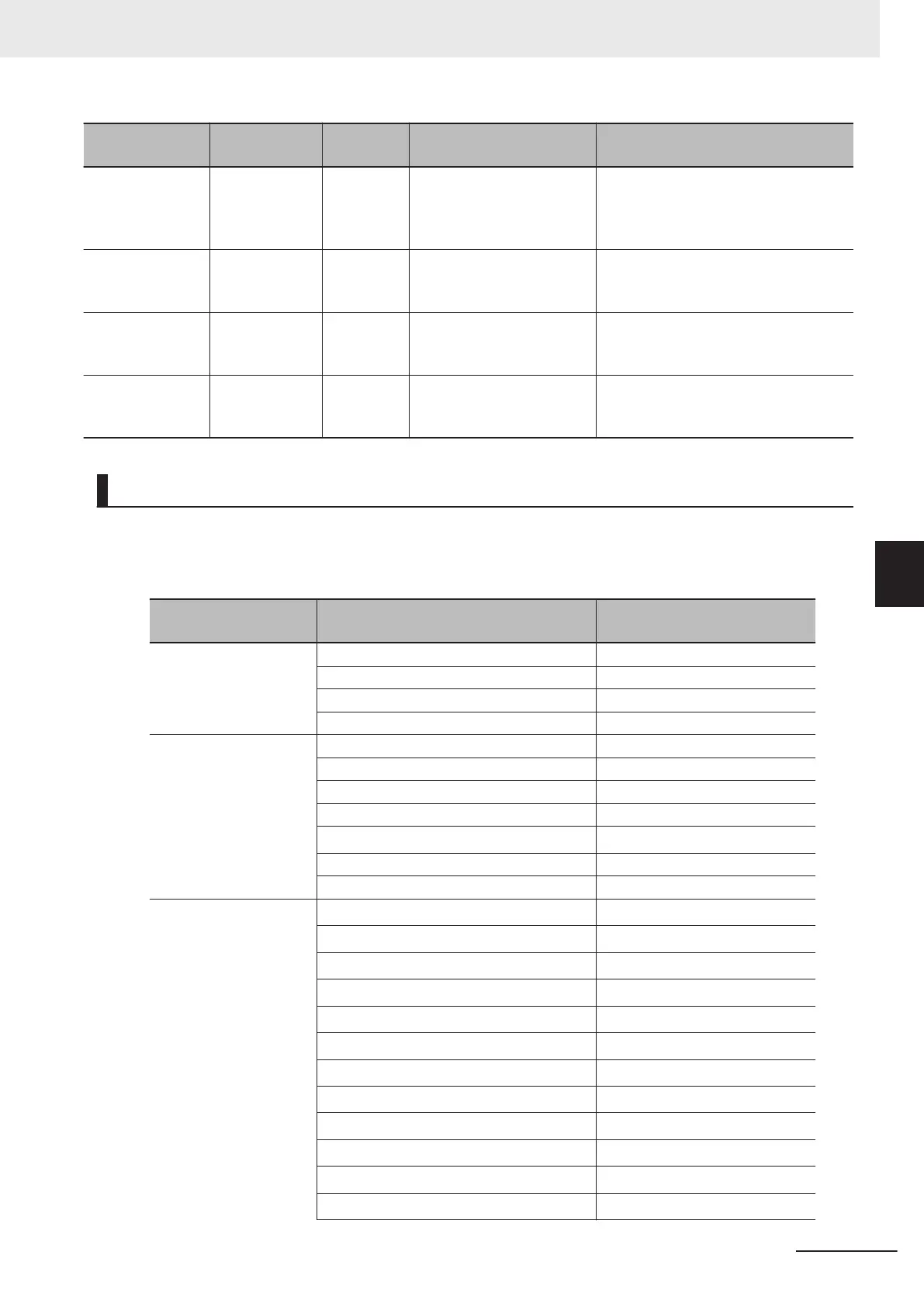
Member
Parameter
name
Data type Valid range Description
HoldingTime Homing Hold-
ing T
ime
UINT 0 to 10,000 Set the holding time in milliseconds
when you set the Homing Operation
Mode to the proximity reverse turn/
holding time.
CompensationVal Homing Com-
pensation V
alue
LREAL Long reals Set the homing compensation value
that is applied after the home is de-
fined.
CompensationVel Homing Com-
pensation V
e-
locity
LREAL Positive long reals Set the velocity to use for homing com-
pensation.
(Reserved) (Reserved
area)
AR-
RA
Y[0..31]
OF BYTE
--- ---
Axis Parameters That Are Written and Read
The axis parameters that you can write with this instruction are given in the following table.
The same axis parameters can be read with the MC_ReadAxisParameter (Read Axis Parameter) in-
struction.
Axis parameter type Axis parameter name
OK: Can be read and written.
---: Cannot be read and written.
Axis Basic Settings Axis Number ---
Axis Use ---
Axis Type ---
Input Device/Output Device ---
Unit Conversion Settings Unit of Display OK
Command Pulse Count Per Motor Rotation OK
Work Travel Distance Per Motor Rotation OK
Reducer Use OK
Work Travel Distance Per Rotation
OK
*1
Work Gear Ratio OK
Motor Gear Ratio OK
Operation Settings Maximum Velocity
OK
*2
Start Velocity
OK
*2
Maximum Jog Velocity
OK
*2
Maximum Acceleration
OK
*2
Maximum Deceleration
OK
*2
Acceleration/Deceleration Over
OK
*2
Operation Selection at Reversing
OK
*2
Velocity Warning Value
OK
*2
Acceleration Warning Value
OK
*2
Deceleration Warning Value
OK
*2
Positive Torque Warning Value
*3
OK
*2
Negative Torque Warning Value
*3
OK
*2
5 Common Command Instructions
5-57
NY-series Motion Control Instructions Reference Manual (W561)
MC_WriteAxisParameter
5
Function