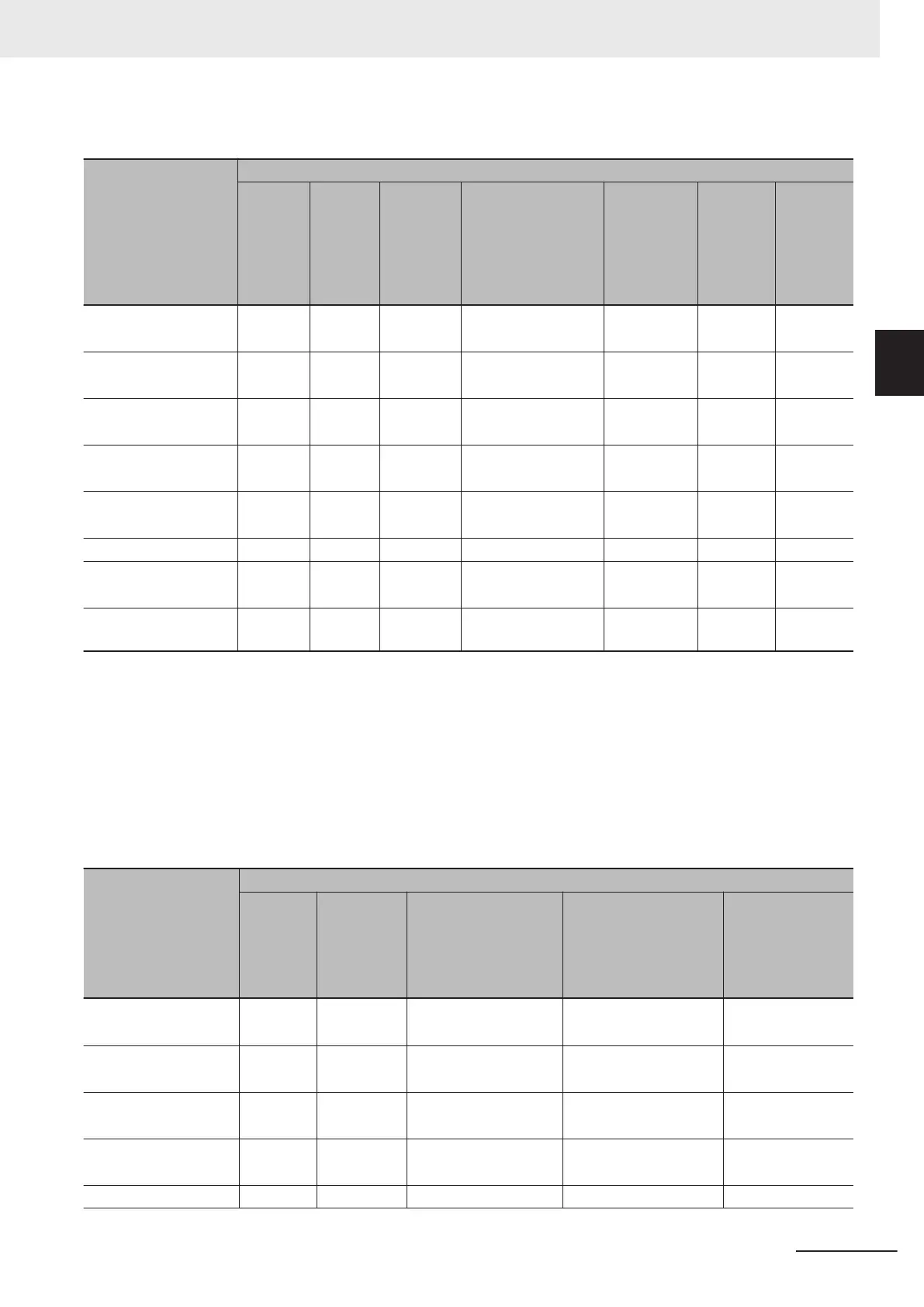
Output Settings
Instruction
Function
Target
velocity
(60FF
hex)
Target
torque
(6071
hex)
Modes of
operation
(6060
hex)
*1
Touch probe func-
tion
(60B8 hex)
Max. profile
velocity
(607F hex)
Positive
torque
limit val-
ue
(60E0
hex)
Negative
torque
limit val-
ue
(60E1
hex)
MC_Home Conditionally re-
quired
*2
MC_HomeWithPara-
meter
Conditionally re-
quired
*2
MC_MoveFeed Conditionally re-
quired
*3
MC_MoveLink Conditionally re-
quired
*4
MC_TorqueControl
Required Required
Conditionally
required
*5
MC_SetTorqueLimit Required Required
MC_TouchProbe Conditionally re-
quired
*2
MC_SyncMoveVeloci-
ty
Required Required
*1. If you set Modes of Operation (6060 hex), also set Modes of Operation Display (6061 hex). Normal operation is not
possible if only one of these objects is set.
*2. Setting is not required for Homing Operation Modes 11, 12, and 14.
*3. Setting is required when Mode is set to Drive Mode.
*4. Setting is required when LinkOption (Synchronization Start Condition) is set to _mcT
riggerDetection and Mode is set
to Drive Mode.
*5. This setting is checked only when an OMRON 1S-series Servo Drive with built-in EtherCAT communications or G5-
series Servo Drive with built-in EtherCAT communications is used.
Input Settings
Instruction
Function
Torque
actual
value
(6077
hex)
Modes of
operation
display
(6061
hex)
*1
Touch probe status
(60B9 hex)
Touch probe pos1
pos value
(60BA hex)
Touch probe
pos2 pos value
(60BC hex)
MC_Home Conditionally re-
quired
*2
Conditionally required
*2
MC_HomeWithPara-
meter
Conditionally re-
quired
*2
Conditionally required
*2
MC_MoveFeed Conditionally re-
quired
*3
Conditionally required
*4
Conditionally re-
quired
*5
MC_MoveLink Conditionally re-
quired
*6
Conditionally required
*7
Conditionally re-
quired
*8
MC_TorqueControl Required Required
2 Variables and Instructions
2-39
NY-series Motion Control Instructions Reference Manual (W561)
2-3 PDO Mapping
2
2-3-2 Objects Required for Specific Instructions