13-29
13
32180 Group User’s Manual (Rev.1.0)
13.2 CAN Module Related Registers
CAN MODULE
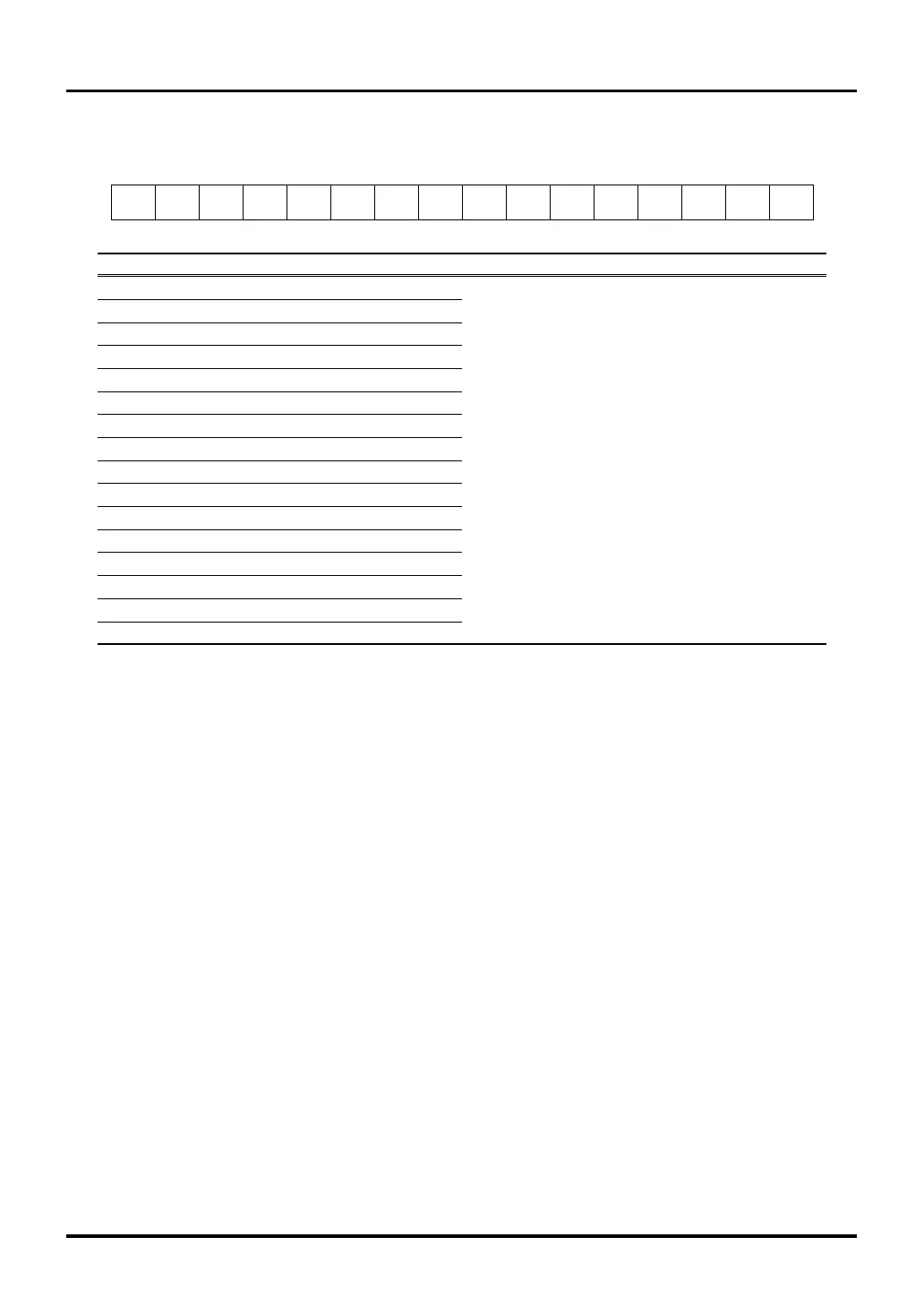
CAN0 Slot Interrupt Request Status Register (CAN0SLIST) <Address: H’0080 100C>
CAN1 Slot Interrupt Request Status Register (CAN1SLIST) <Address: H’0080 140C>
b0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 b15
SSB0 SSB1 SSB2 SSB3 SSB4 SSB6 SSB7 SSB8 SSB9 SSB10 SSB11 SSB12 SSB13 SSB14 SSB15SSB5
0000000000000000
<After reset: H’0000>
b Bit Name Function R W
0 SSB0 (slot 0 interrupt request status bit) 0: Interrupt not requested R(Note 1)
1 SSB1 (slot 1 interrupt request status bit) 1: Interrupt requested
2 SSB2 (slot 2 interrupt request status bit)
3 SSB3 (slot 3 interrupt request status bit)
4 SSB4 (slot 4 interrupt request status bit)
5 SSB5 (slot 5 interrupt request status bit)
6 SSB6 (slot 6 interrupt request status bit)
7 SSB7 (slot 7 interrupt request status bit)
8 SSB8 (slot 8 interrupt request status bit)
9 SSB9 (slot 9 interrupt request status bit)
10 SSB10 (slot 10 interrupt request status bit)
11 SSB11 (slot 11 interrupt request status bit)
12 SSB12 (slot 12 interrupt request status bit)
13 SSB13 (slot 13 interrupt request status bit)
14 SSB14 (slot 14 interrupt request status bit)
15 SSB15 (slot 15 interrupt request status bit)
Note 1: Only writing "0" is effective. Writing "1" has no effect; the bit retains the status it had before the write.
When using CAN interrupts, this register helps to know which slot requested an interrupt.
• Slots set for transmission
The corresponding bit is set to "1" when the CAN module finished sending. This bit is cleared by writing "0" in
software.
• Slots set for reception
The corresponding bit is set to "1" when the CAN module finished receiving and finished storing the received
message in the message slot. This bit is cleared by writing "0" in software.
When writing to the CAN slot interrupt request status, make sure only the bits to be cleared are set to "0" and all
other bits are set to "1". Those bits that have been set to "1" are unaffected by writing in software and retain the
value they had before the write.
Notes: • If the automatic response function is enabled for remote frame receive slots, the request status
is set after the CAN module finished receiving a remote frame and after it finished sending a
data frame.
• For remote frame transmit slots, the request status is set after the CAN module finished sending
a remote frame and after it finished receiving a data frame.
• If the request status is set by an interrupt request at the same time it is cleared in software, the
former has priority so that the request status is set.

 Loading...
Loading...