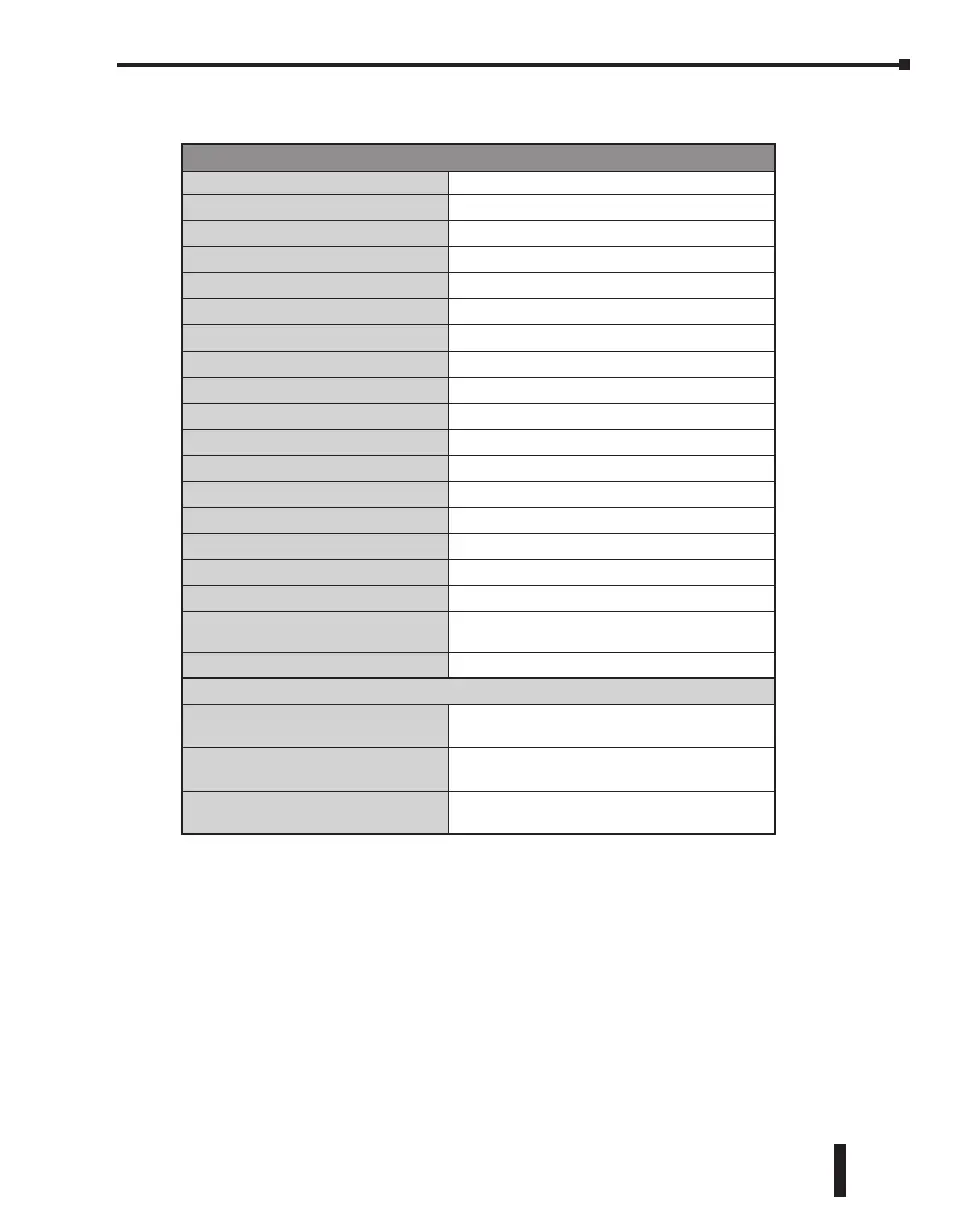
PID Specifications
PID maximum number of loops
8
Required Memory
40 C bits, 15 DS registers, 25 DF registers
Control Algorithm
Position
Control Loop Action
Direct-acting or Reverse-acting
Error Term
Linear or Squared
Error Dead band
Configurable
Proportional Gain
0.01–10000
Reset Time (Integral)
0.01–6000
Derivative Gain
0.0–6000
Sampling rate
100ms to 30000ms
Loop Calculation
PID or PI
PV Filter
Configurable
Set Point
Maximum and minimum values can be set
Control Output
Maximum and minimum values can be set
Derivative Gain Limit
Configurable
Bias Freeze (Anti-Windup)
Yes
Bumpless Transfer
2 Modes
Pulse Width Modulation (PWM)
Output
Yes, up to 600 second period
Auto Tuning
Ziegler-Nichols Limit Cycle
Alarms
PV Alarm
PV alarm value can be set at Low-low, Low,
High, High-high condition
Deviation Alarm
Specify alarms for two ranges of PV deviation
from the setpoint value
PV Rate of Change
Detect when PV exceeds a rate of change limit
you specify
CLICK Software PID Specifications
CLICK PLC Hardware User Manual, 6th Edition, Rev. G – C0-USER-M
2–33
Chapter 2: Specifications