D1 Servo Drive User Manual Protection Function
HIWIN MIKROSYSTEM CORP. 8-3
Note:
(1)
*1
The maximum default setting of Acc. and Dec. of linear motor is 2 G.
(2)
*2
J
m
is the moment of inertia obtained from inertia estimation.
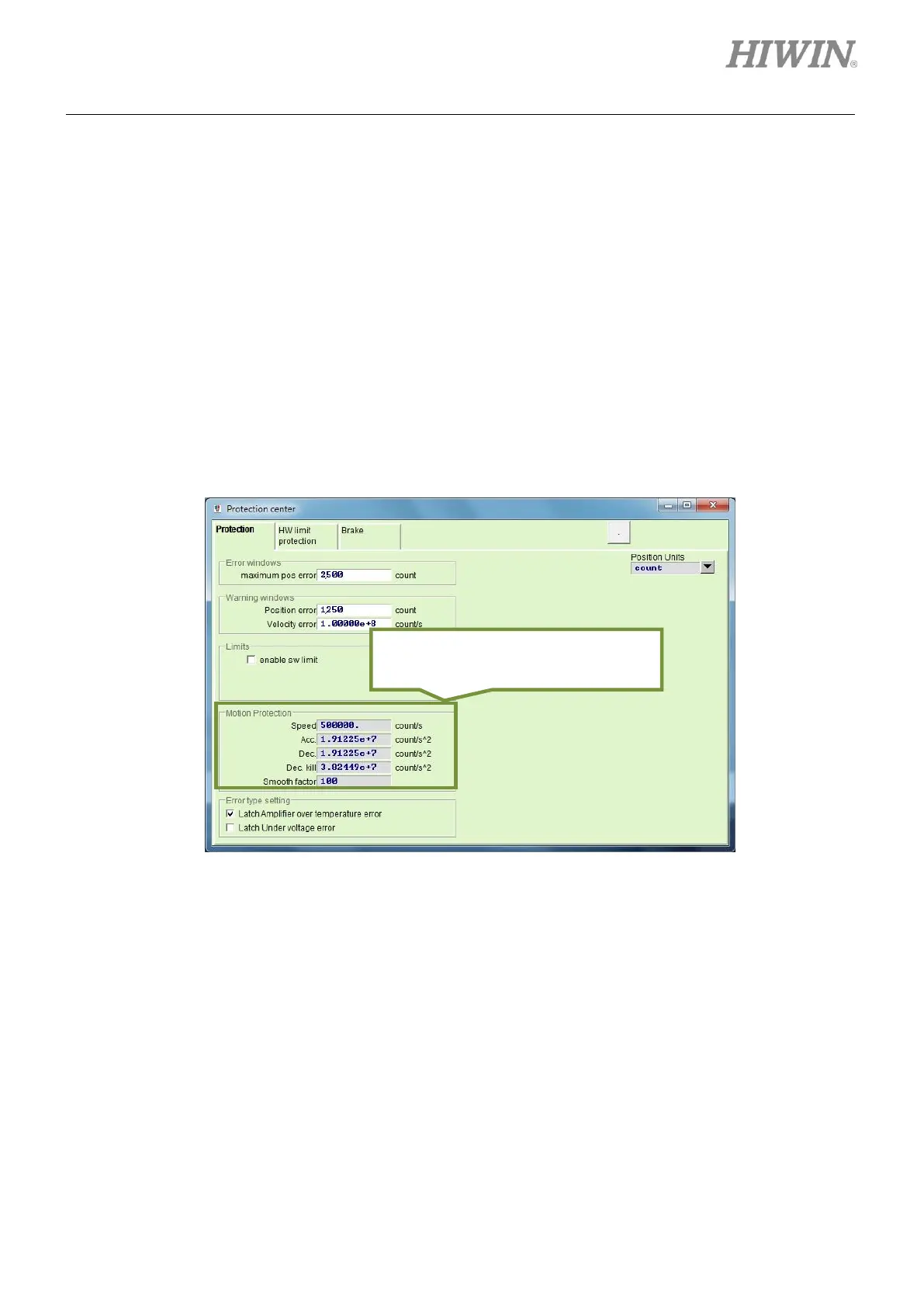
In figure 8.1.1, the maximum speed, maximum acceleration and maximum deceleration of motion
can be set in the setting area of Motion protection. User can select preferred unit from the
drop-down list of Position units. In addition to motion protection, these settings are also used for
test run.
While performing point to point motion (P2P), relative move and jog in Performance center, ensure
the parameters set in the area of Motion protection are for motion protection. In position mode or
velocity mode, multiply the setting values of Acc. and Dec. by 10 to 100, so the performance will not
be limited by motion protection function. If not, the performance could be limited.
Figure8.1.2
(2) Cancel speed, acceleration and deceleration limits
In position mode, when smooth factor is set to 0, it means speed, acceleration and deceleration
limits are cancelled. At this time, the motor moves exactly according to the path planned by the
controller. User can decide whether to cancel the limit function of the servo drive.
These parameters cannot be modified
in Protection page.
 Loading...
Loading...


