6 Vector Control
6 - 38
High-function General-purpose Inverter 3G3RX-V1 User’s Manual (I578-E1)
Setting Example
To operate the inverter under the above conditions, set the following data on the slave inverter.
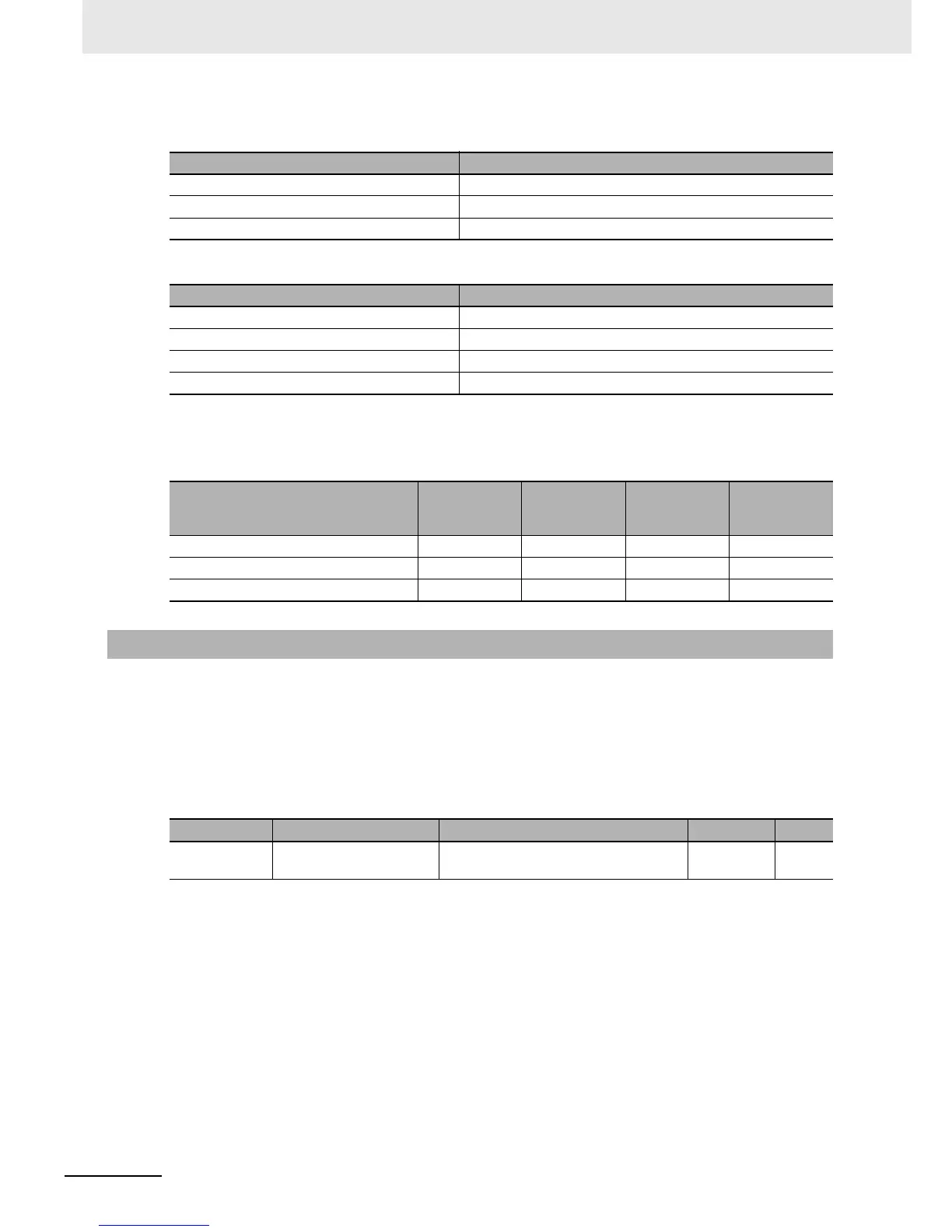
The following shows an example of the ratio of the slave rpm to the master rpm according to the P019
to P021 settings.
It assumes that the same number of encoder pulses (1,024 pulses) is set on both inverters.
• Use this function to shift the origin position by adding the value set in the Position Bias Amount
(P024) to the value of the origin determined through origin search (encoder Z-phase detection)
operation in the pulse train position control mode.
• This function is useful for shifting the mechanical system origin to an application-specific origin,
adjusting the phase of synchronization points during synchronous operation, and so on.
• Set an addition value in the Position Bias Amount (P024). A positive value adds the value in the
forward direction.
Note The current value at completion of origin search operation, etc. can be preset.
Item Setting
Main motor Number of encoder pulses = 1,024
Sub motor Number of encoder pulses = 3,000
Ratio of main motor rpm to sub motor rpm = 2:1
Item Setting
Pulse Train Input Selection (P013) 00 (90°phase difference pulse train)
Electronic Gear Position Selection (P019) 01 (REF)
Electronic Gear Ratio Numerator (P020) 3,000
Electronic Gear Ratio Denominator (P021) 1,024 × 2 = 2,048
Electronic Gear Position Selection
(P019)
REF
(Position
command side)
REF
(Position
command side)
FB
(Position
feedback side)
FB
(Position
feedback side)
Electronic Gear Ratio Numerator (P020) 1,024 2,048 1,024 2,048
Electronic Gear Ratio Denominator (P021)
2,048 1,024 2,048 1,024
Slave rpm/Master rpm 1/2 2 2 1/2
6-6-3 Position Bias Function
Parameter No. Function name Data Default data Unit
P024 Position Bias Amount
–204 to –100 (–2048 to –1000),
–999. to 2048
0. –