Relationship between Axis Types and Position Types
The relationship between the axis types that you can monitor and position types that is monitored is
shown below
.
Axis Type
ReferenceType
_mcCommand or _mcLatestCommand _mcFeedback
Servo axis OK OK
Encoder axis
No
*1
OK
Virtual servo axis OK OK
Virtual encoder
axis
No
*1
OK
*1. A Position Type Selection Out of Range error (error code: 5430 hex) occurs when the instruction is execut-
ed.
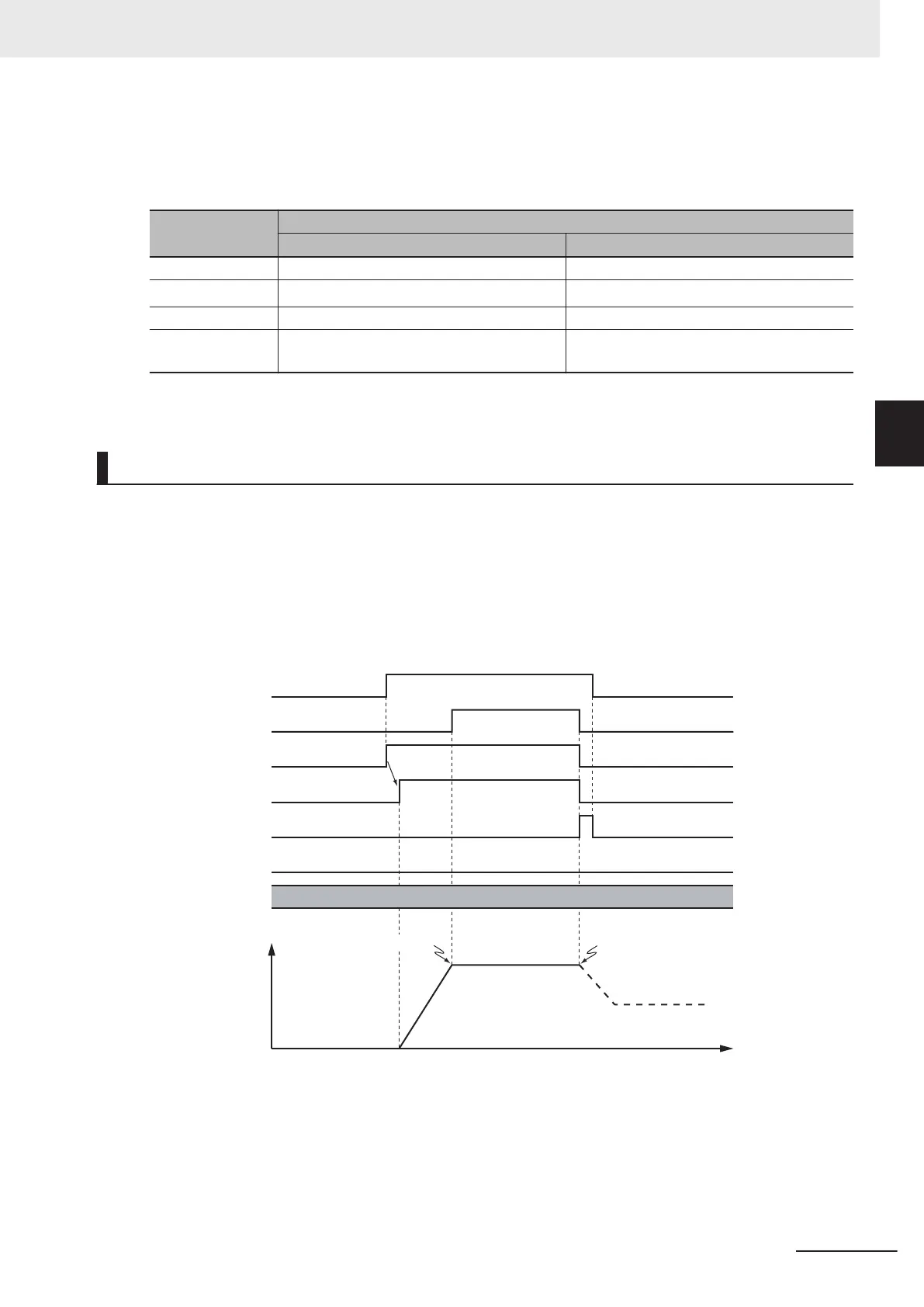
Timing Charts
• Busy (Executing) changes to TRUE at the same time as Execute changes to TRUE. Active (Control-
ling) changes to TRUE in the next period.
• InGear (Gear Ratio Reached) changes to TRUE when the target velocity is reached.
•
If another instruction aborts this instruction, CommandAborted changes to TRUE and Busy (Execut-
ing), Active (Controlling), and InGear (Gear Ratio Reached) change to FALSE.
• Use the MC_GearOut (End Gear Operation) or MC_Stop instruction to stop electronic gear opera-
tion before it is completed.
MC_
GearIn executed.
Time
Multi-execution of
another instruction
Velocity
Busy
CommandAborted
InGear
Error
16#0000
ErrorID
Execute
Active
InGearPhase
You can specify the Acceleration
(Acceleration Rate) and Deceleration (Deceleration Rate) as input
variables.
3 Axis Command Instructions
3-251
NY-series Motion Control Instructions Reference Manual (W561)
MC_GearIn
3
Function