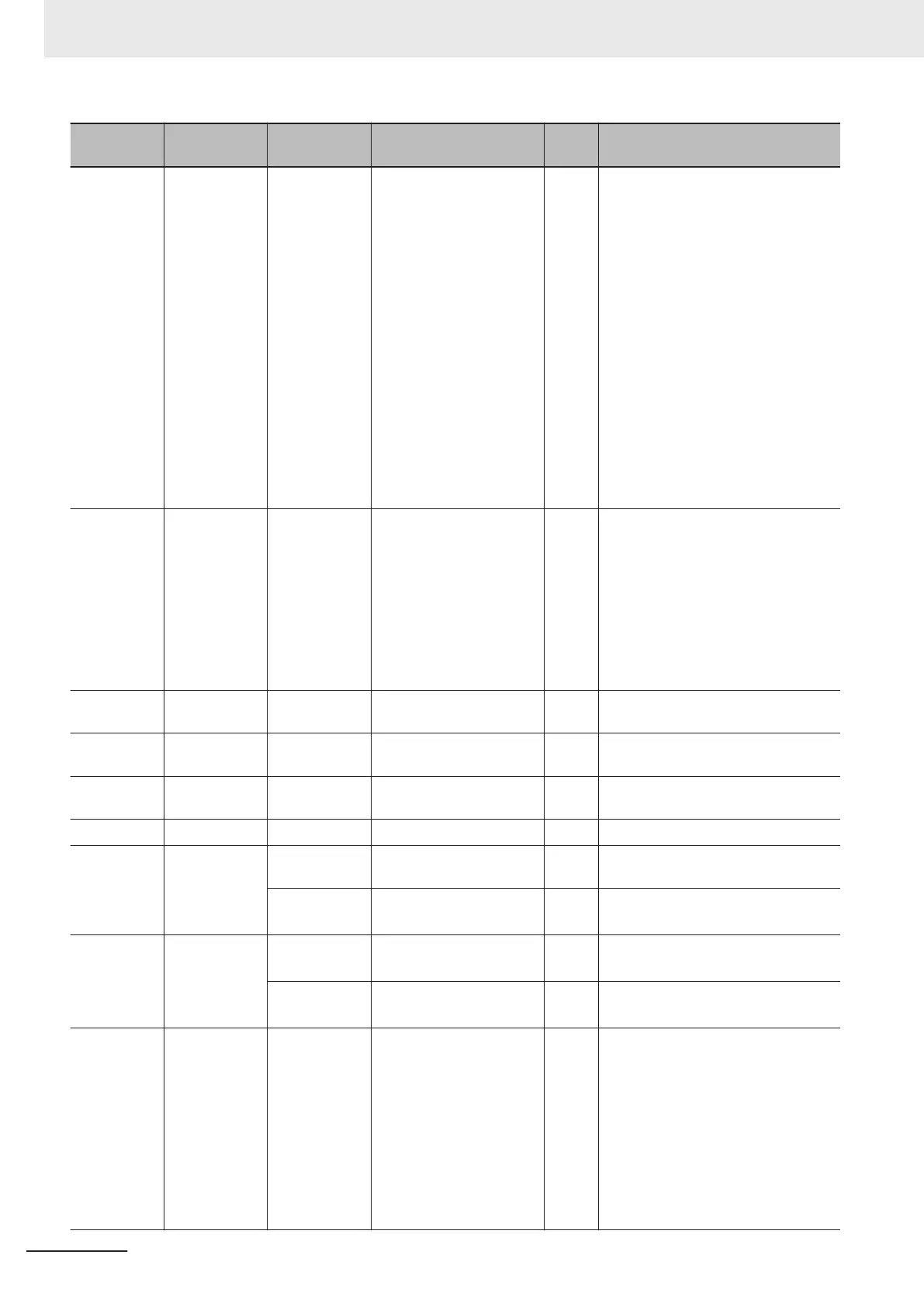
Name Meaning Data type Valid range
De-
fault
Description
NegativeEn-
able
Negative Di-
rection Enable
BOOL TRUE or FALSE FALS
E
• MC_MoveJog Instruction
When this variable changes to
TRUE, the axis starts moving in
the negative direction. When it
changes to F
ALSE, the axis stops
moving. The Velocity,
Acceleration, and Deceleration in-
put variables to the MC_MoveJog
instruction are read when
NegativeEnable changes to
TRUE.
• MC_SetTorqueLimit Instruction
When this variable changes to
TRUE, the negative torque limit is
enabled. When it changes to
FALSE, the negative torque limit
is disabled.
BufferMode Buffer Mode
Selection
_eMC_BUF-
FER_MODE
0: _mcAborting
1: _mcBuf
fered
2: _mcBlendingLow
3: _mcBlendingPrevious
4: _mcBlendingNext
5: _mcBlendingHigh
0
*1
Specifies the operation when exe-
cuting more than one motion instruc-
tion.
0: Aborting
1: Buffered
2: Blending low
3: Blending previous
4: Blending next
5: Blending high
Velocity Target Veloci-
ty
LREAL
Positive number
*2
0
Specifies the target velocity.
*3
Acceleration Acceleration
Rate
LREAL Non-negative number 0
Specifies the acceleration rate.
*4
Deceleration Deceleration
Rate
LREAL Non-negative number 0
Specifies the deceleration rate.
*4
Jerk Jerk LREAL Non-negative number 0
Specifies the jerk.
*5
Distance Travel Dis-
tance
LREAL Negative number, posi-
tive number
, or 0
0 Specifies the travel distance from
the command current position.
ARRAY [0..3]
OF LREAL
Negative number, posi-
tive number
, or 0
0 Specifies the target position for line-
ar interpolation.
*6
Position Target Posi-
tion
LREAL Negative number, posi-
tive number
, or 0
0 Specifies the absolute target posi-
tion.
*6
ARRAY [0..3]
OF LREAL
Negative number, posi-
tive number
, or 0
0 Specifies the target position for line-
ar interpolation.
*6
VelFactor Velocity Over-
ride Factor
LREAL 0 to 500 100 Specifies the velocity override factor.
The valid range of the override fac-
tors is between 0.01 and 500.00.
V
alues above 500.00 are treated as
500 and values less then 0.01 (in-
cluding negative values) are treated
as 0.01.
The override factor will be 0 only
when 0 is specified.
The unit is %.
2 Variables and Instructions
2-14
NY-series Motion Control Instructions Reference Manual (W561)