It is possible for some trips to cause the motor to stop before the trip is initiated (see ActionOnTripDetection (10.037)). During the period while the motor is being
stopped before the trip is initiated StopMotor (10.080) is set to one. Once the motor stops StopMotor (10.080) is set back to zero.
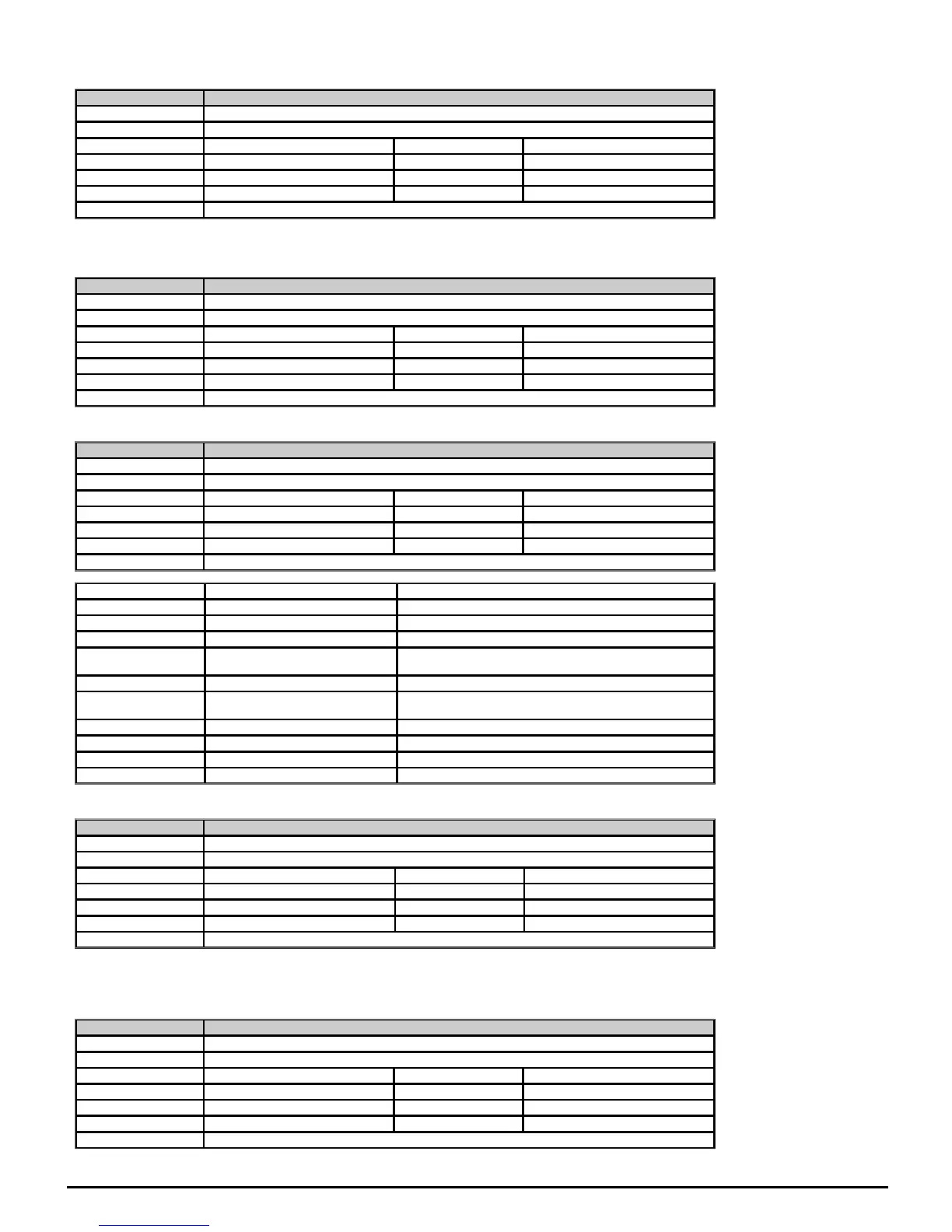
Parameter 10.081 Phase Loss
Short description Indicates that the drive has detected an input phase loss
Mode Open‑loop
Minimum 0 Maximum 1
Default Units
Type 1 Bit Volatile Update Rate Background write
Display Format Standard Decimal Places 0
Coding RO, ND, NC, PT
If phase loss or imbalance is detected that would initiate a phase loss trip with sub-trip 0, i.e. PhaseLoss.000, then PhaseLoss (10.081) is set to one. Either the
motor will be stopped and the drive tripped or the drive will continue to operate normally until the user stops the motor and the drive trips (see
ActionOnTripDetection (10.037)). In either case PhaseLoss (10.081) is set to one when the phase loss condition is detected and remains set until the drive trips.
Parameter 10.090 Drive Ready
Short description Indicates that the drive is ready and a run command is not active
Mode Open‑loop
Minimum 0 Maximum 1
Default Units
Type 1 Bit Volatile Update Rate Background write
Display Format Standard Decimal Places 0
Coding RO, ND, NC, PT
DriveReady (10.090) indicates that the drive is ready and a run command is not active.
Parameter 10.101 Drive Status
Short description Shows the present status of the drive
Mode Open‑loop
Minimum 0 Maximum 15
Default Units
Type 8 Bit Volatile Update Rate Background write
Display Format Standard Decimal Places 0
Coding RO, TE, ND, NC, PT, BU
Value Text Description
0 inh Drive is not enabled
1 rdy Drive is enabled but has not received a Run command
2 Stop Drive has been stopped, but is still active
4 Run
Drive is running (not seen on LED display on M100 - M300, the
frequency is displayed instead)
5 S.Loss Supply loss has been detected
6 dEcEl
Drive is decelerating (not seen on LED display on M100 - M300,
the frequency is displayed instead)
7 dc.inj Drive is applying current injection to the motor
9 Error Drive has tripped
14 Heat Current is being applied to the motor to warm it up
15 UU Drive is in the Under Voltage state
DriveStatus (10.101) shows the present status of the drive. The strings from this parameter are also used by the basic keypad to provide the status display text.
Parameter 10.102 Trip Reset Source
Short description Indicates whether a trip in the trip log has been reset
Mode Open‑loop
Minimum 0 Maximum 1023
Default Units
Type 16 Bit Power Down Save Update Rate Write on trip
Display Format Standard Decimal Places 0
Coding RO, ND, NC, PT, BU
The bits in TripResetSource (10.102) correspond to each of the trips in the trip log (i.e. bit 0 corresponds to trip 0, bit 1 corresponds to trip 1, etc.). When a trip
occurs, bit 0 is set to one and the other bits corresponding to the trips already in the trip log are shifted left one bit. If the trip is reset then bit 0 is set back to zero,
otherwise if a higher priority trip occurs bit 0 is shifted left by one bit. The result is that each of the bits in TripResetSource (10.102) show whether trips in the trip log
were reset or moved up the trip log by a higher priority trip.
Parameter 10.103 Trip Time Identifier
Short description Shows time in milliseconds since the drive powered up when a trip occurred
Mode Open‑loop
Minimum -2147483648 Maximum 2147483647
Default Units ms
Type 32 Bit Volatile Update Rate Write on trip
Display Format Standard Decimal Places 0
Coding RO, ND, NC, PT
When a trip occurs the time in milliseconds since the drive powered up is stored in TripTimeIdentifier (10.103). The time rolls-over when it reaches 2
32
- 1, but if the

 Loading...
Loading...













