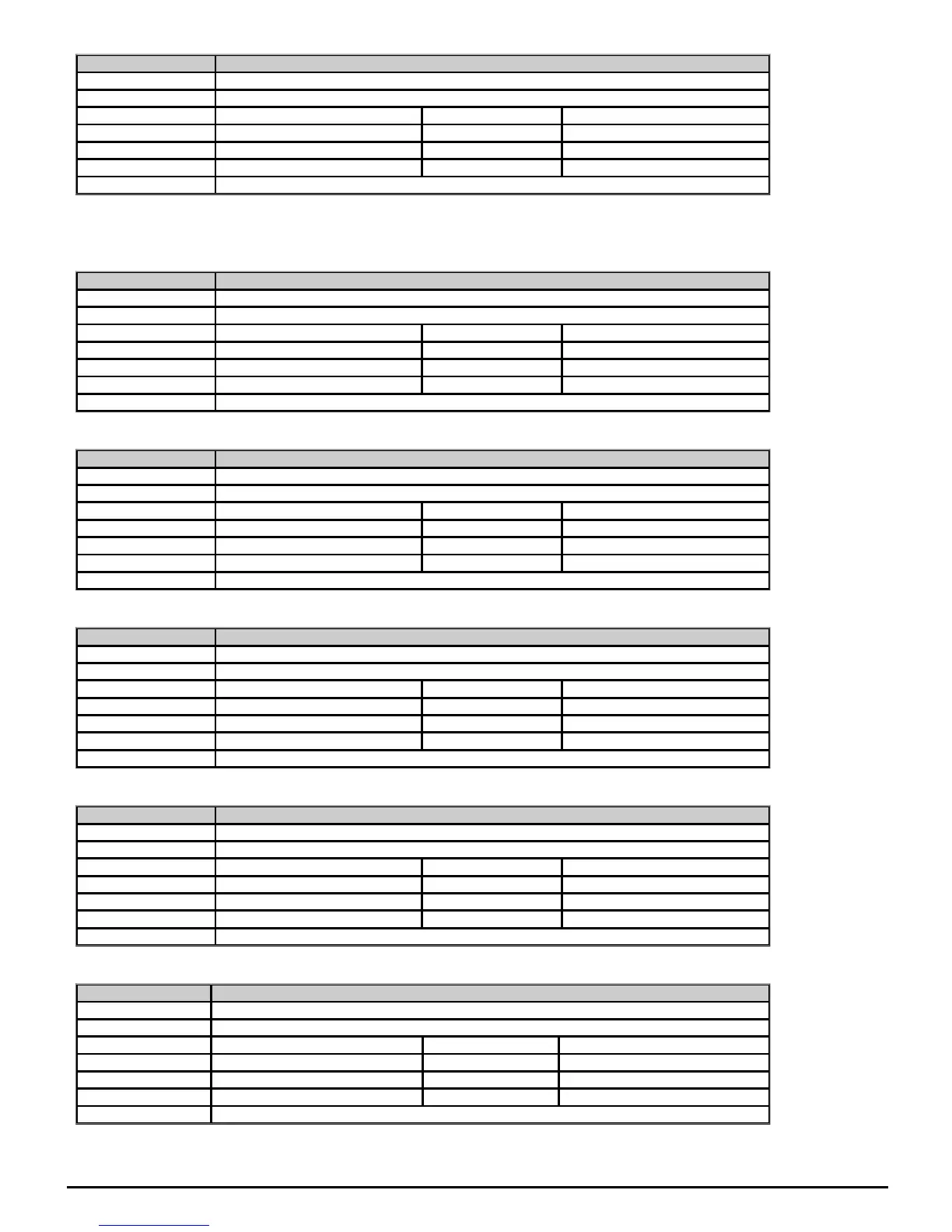
Parameter 21.015 Motor 2 Active
Short description Indicates if motor 2 parameters are being used by the drive
Mode Open‑loop
Minimum 0 Maximum 1
Default Units
Type 1 Bit Volatile Update Rate Background write
Display Format Standard Decimal Places 0
Coding RO, ND, NC, PT
If Motor2Active (21.015) = 0 then the standard motor set-up parameters are being used or if Motor2Active (21.015) = 1 then the motor 2 parameters
are being used. The motor set-up parameters do not necessarily change immediately when SelectMotor2Parameters (11.045) is changed (i.e. the
drive may be enabled). Motor2Active (21.015) shows the actual motor parameters being used and only changes when the new parameters start being
used by the drive.
Parameter 21.016 M2 Motor Thermal Time Constant 1
Short description Defines the thermal time constant of the motor used for motor map 2
Mode Open‑loop
Minimum 1 Maximum 3000
Default 179 Units s
Type 16 Bit User Save Update Rate Background read
Display Format Standard Decimal Places 0
Coding RW
This is the motor map 2 equivalent of MotorThermalTimeConstant1 (04.015).
Parameter 21.022 M2 Current Controller Kp Gain
Short description Defines the Kp value of the current controller used for motor map 2
Mode Open‑loop
Minimum 0.00 Maximum 4000.00
Default 20.00 Units
Type 32 Bit User Save Update Rate Background read
Display Format Standard Decimal Places 2
Coding RW
This is the motor map 2 equivalent for CurrentControllerKpGain (04.013).
Parameter 21.023 M2 Current Controller Ki Gain
Short description Defines the Ki value of the current controller used for motor map 2
Mode Open‑loop
Minimum 0.000 Maximum 600.000
Default 40.000 Units
Type 32 Bit User Save Update Rate Background read
Display Format Standard Decimal Places 3
Coding RW
This is the motor map 2 equivalent for CurrentControllerKiGain (04.014).
Parameter 21.024 M2 Stator Inductance
Short description Defines the stator inductance of the motor used for motor map 2
Mode Open‑loop
Minimum 0.00 Maximum 5000.00
Default 0.00 Units mH
Type 32 Bit User Save Update Rate Background read
Display Format Standard Decimal Places 2
Coding RW, RA
This is the motor map 2 equivalent for StatorInductance (05.025).
Parameter 21.027 M2 Motoring Current Limit
Short description Defines the motoring current limit used for motor map 2
Mode Open‑loop
Minimum −VM_MOTOR2_CURRENT_LIMIT Maximum VM_MOTOR2_CURRENT_LIMIT
Default 165.0 Units %
Type 16 Bit User Save Update Rate 16ms
Display Format Standard Decimal Places 1
Coding RW, VM, RA
This is the motor map 2 equivalent for MotoringCurrentLimit (04.005).

 Loading...
Loading...













